1.腕の運動はどのように起るか?
私たちは、普段あまり意識することなく腕、
指、足、口、眼球などを動かしています。
動作に失敗すれば、やり直したり練習したりして、その動作
を次に行うとき失敗しないようにすることでしょう。そのよ
うな練習によって、なめらかで巧みな運動が可能になります。
このような我々の意図する運動は、全て脳によって制御されています。脳の幾
つもの部位で多くのニューロンが活動し、多くの筋肉へ送る指令を調整しています。
脳がどのように筋肉への指令を調整しているかということは、普段の私たちの意識に
昇ることはありません。それのもかかわらず、目的とする運動が達成されるように、
筋の活動はうまく調整されています。
はたして、この調整はどのようなプログラムに基ずいて行われるのでしょうか?
Topへ

2.自由運動をすると手先はほぼ真直ぐ動く
平面内で手先をある位置からある位置に動かすと、
どこからどこに動かしても手先は
ほぼ直線の軌道を描きます。
腕のダイナミクスは非線型でかつ上腕と前腕との力学的干渉があるため、手先を直線
的に動かすためには、筋の活動を方向や速度に合わせて調整する必要があります。
これらの筋活動に見られるように、運動により筋の活動パターンは全く異なります。
これらの筋活動は、どのよなメカニズムによって生成されるのでしょうか?
Topへ
3.腕運動制御法則の仮説
このように手先の軌道が真直ぐになるのは、脳が何らかの規則に基づいて運動を制御
しているからであると、従来次のような仮説が提案されています。
仮説1
脳は、手先の軌道を直線にすることを運動目標に、筋活動をコーディネイトしている。そのため、
「手先が直線軌道となること」は腕運動の不偏的特徴である。
すなわち、
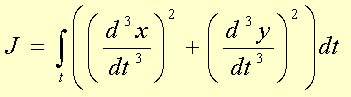
のような評価を最小にするような運動が計画および遂行される。
仮説2
運動に必要なトルクや筋張力などの評価に基づいて指令が生成される。
すなわち、
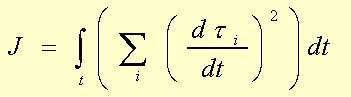
のような評価を最小にするような運動が計画および遂行される。
自由空間での運動ではどちらの仮説に従って運動を計画しても、ほぼ似たような
直線的運度が生成されます。このため、仮説の是非を問うことは困難でした。
そこで、2つの仮説で生成される軌道が異なるように、「干渉粘性場」を用いて外界を変化させました。
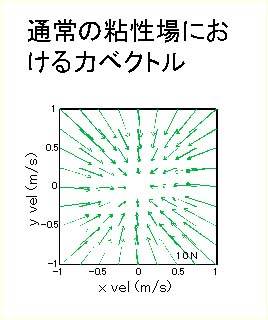
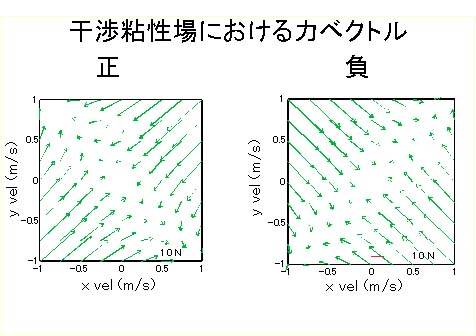
このような干渉粘性場で運動を行ったとき、
手先軌道はどのようになるのでしょうか?
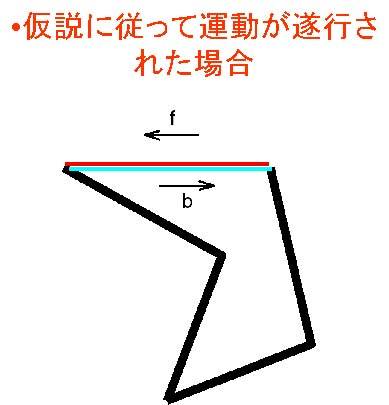
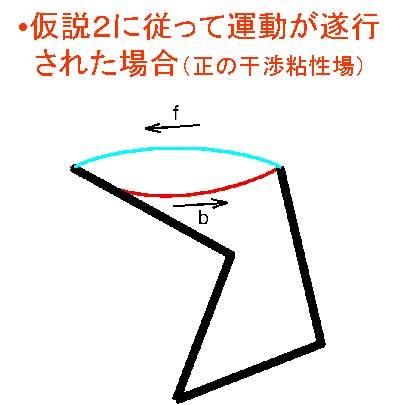
干渉粘性場で運動を行ったとき
それぞれの仮説が予測する手先軌道
Topへ
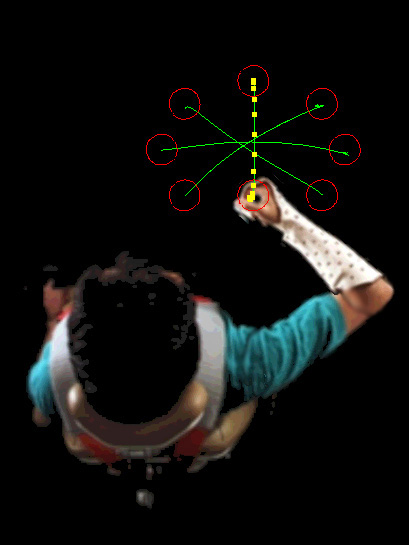
4.実験
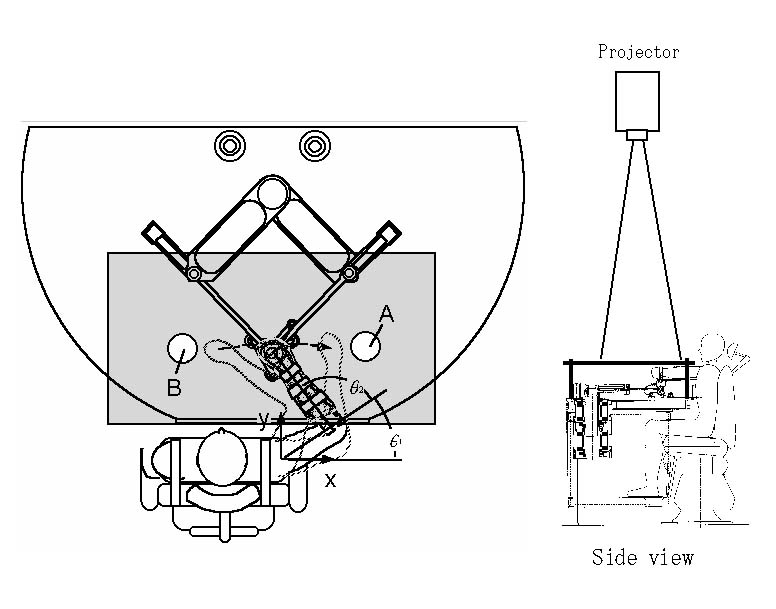
この実験には、マニピュランダム(上図)という装置を用いました。
この装置は、様々力学場(慣性、粘性、弾性)をインピーダンス制御
により実現することが出来ます。
本実験では、仮想的に干渉粘性場を実現し、ブザーに合わせて、一定時間
で終点に手先を到達させる運動において、手先起動、筋活動などを記録しました。
Topへ
5.実験の結果
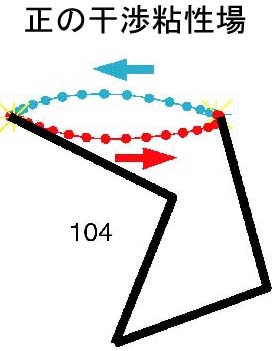
正の干渉粘性場での第一回目の試行では
なめらかに目標に到達できず、修正動作がおこっています。
回数を重ねるに従い、なめらかな運動が得られ
るようになります。練習後も、起動は直線を描かず、
順逆の運動で、起動が曲がる方向が逆になるという
結果が得られました。
正と負の干渉粘性場での手先起動の違い
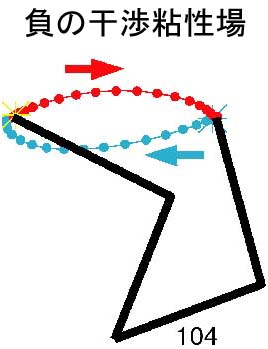
負の干渉粘性場で同様の実験を行うと、
学習後の手先起動の曲がり方が正の干
渉粘性場の場合と逆になりました。
Topへ
6.まとめ
・外界のダイナミクスが突然変化した場合、腕の運動は大きく乱れる。
・練習によってなめらかな軌道が得られる。
・練習後も軌道は直線にならずに曲がったまま。
・往復の運動で軌道は逆に曲がる。
・正負の干渉粘性場では軌道の曲がりが逆転。
この実験結果は、外界のダイナミクスを考慮して運動の計画/遂行がなされ、
その計算のために腕・外界の内部モデルが脳に記憶されていることを示唆しています。
情報を発信するために、多彩に動かす手や口などの巧みな運動制御は、このような内部
モデルを用いて実現されていると考えられます。
本研究に関するご質問はgomi@idea.brl.ntt.co.jpまで
Topへ