Full-resolution
Reconfiguration Planning for Heterogeneous Cube-shaped Modular Robots with only
Sliding Motion Primitive
Hiroshi Kawano
Linear Version was presented @ ICRA2020
Virtual Conference. (available from IEEE Xplorer)
Quadratic version was presented @ ICRA2016. (available from IEEE
Xplorer)

Abstract: This paper presents a
full-resolution reconfiguration algorithm for a heterogeneous modular robot
composed of sliding cube modules with a limited motion primitive. We assume that a cube
module is not allowed to make convex motions around other modules but is
allowed to slide across other modules’ surfaces. The availability of reconfiguration algorithm for
such a module with limited mobility overcomes restrictions in the design of
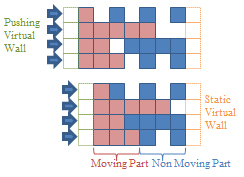
modular robots. To overcome the limited mobility of the assumed cube module, we
introduce a method that compresses a robot with virtual walls and executes a
reconfiguration and heterogeneous permutation of the robot structure in the
compressed configuration. We prove the correctness and completeness of the
proposed algorithm for three-dimensional connected structures. Simulation
results show that the reconfiguration in free space is executed in quadratic
operating time cost.
Background
of the Research:
Previously studied reconfiguration
methods for sliding cubic modular robot assume the availability of convex
motion that provides the module high mobility. The cubic module that uses
convex motion can go to any places on the surface of the robot structure. This
guarantees the existence of movable module in the robot structure; here, the
term “movable” is used when a modules can be removed from the robot structure
without disconnecting the robot structure. But, if the cubic module is not
allowed to use convex motion, the existence of the movable module is not
guaranteed. And it causes a lot of difficulty in the reconfiguration of sliding
cubic modular robots. For example, 1-D liner structure contains no movable
module, and reconfiguration between configurations with different dimension is
unavailable.
Figure
1. Limited accessibility of sliding only cubic modules on robot surface.
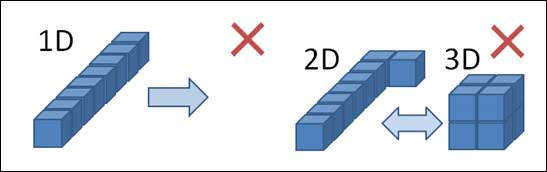
Figure 2. Unavailability of reconfiguration of
sliding only cube between configurations with different dimension.
Summary
of the proposed reconfiguration algorithm is as follows:
The
proposed method consists of four stages:
1. Compression to the intermediate
configuration.
2. Transformation to the next intermediate
configuration that allows permutation process.
3. Permutation process.
4. Transformation to the
intermediate configuration that is extended to the goal configuration in the
next stage.
5. Extension to the goal
configuration.
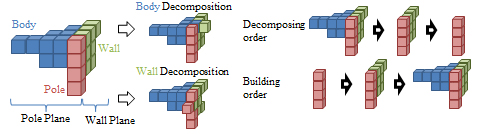
1. A robot is compressed to
intermediate configuration with two perpendicular planes.
・Compression in two direction via
virtual wall without disconnection.
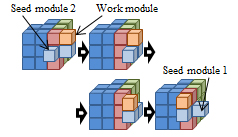
2. The robot is transformed to the
form with a rectangular ceiling in which the permutation process is carried
out.
・Definition of intermediate
configuration
・Module transfer between two
perpendicular planes using seed modules

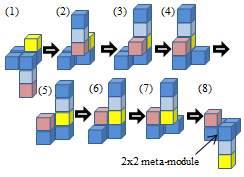
3. The permutation process is
carried out.
・2x2 Rectangular space on the
ceiling is used in each position exchange process.
4. As in 2., the robot is
transformed to the form in which the robot has been prepared to be extended to
the goal configuration.
5. The robot is extended to the
goal configuration. (Just as the reverse motion of compression in (1) )
Full
Demonstration:

Last
Updated on 2018.06.14