Tunneling-Based
Self-Reconfiguration of Heterogeneous Sliding Cube-Shaped Modular Robots in
Environments with Obstacles
Hiroshi Kawano
The results of this topic have been
published in journal
RAS,
DARS2018, ICRA2018, ICRA2017 and IROS2015.
Papers
are available from
ICRA2017 IROS2015
DARS2018, RAS

Abstract: This
paper studies a reconfiguration
algorithm for heterogeneous cubic modular robots in environments with
obstacles. Tunneling is suitable for the transformation of cubic modular robots
in such an environment because a tunneling robot only passes spaces that are
occupied by the robot in the start and goal configurations. We propose a method
that realizes a tunneling reconfiguration for arbitrary arrangement of the
start and goal configuration in which there are multiple and disconnected
overlapped parts (In the previous method, the application is limited to the
case with single connected overlapping part between the start and goal
configuration.). The tunneling algorithm is implemented in distributed form. We
have also designed a permutation algorithm that can be executed in the space
used by the tunneling robot. Considering the application in environments with
obstacles, for an instance of the tunneling modular robots, we assumed a usage
of a motion primitive with only sliding motion along another module’s surface,
which does not allows convex motions. We also assumes a usage of the
three-dimensional 2![]() 2
2![]() 2 meta-module to guarantee the existence of
mobile modules and maintain the connectivity of the robot structure during the
tunneling and permutation processes. We show that the algorithm is complete for
a connected robot structure with more than one meta-module and that the
reconfiguration in an environment with obstacles is executed in quadratic
operating time cost.
2 meta-module to guarantee the existence of
mobile modules and maintain the connectivity of the robot structure during the
tunneling and permutation processes. We show that the algorithm is complete for
a connected robot structure with more than one meta-module and that the
reconfiguration in an environment with obstacles is executed in quadratic
operating time cost.
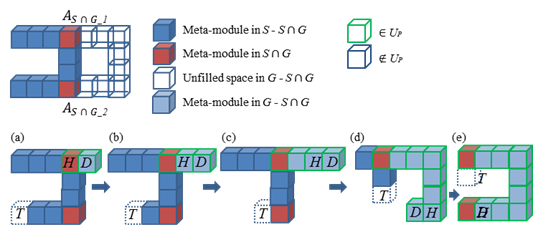
Tunneling
method for the Multiple Overlapping Parts Case: (See DARS2018, RAS papers)
(1) 2x2x2 cubic meta-module
structure with sliding only motion is assumed. The algorithm composed of
homogeneous tunneling transformation and heterogeneous permutation processes.
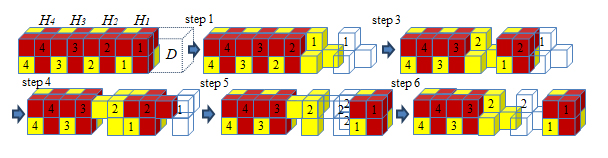
(2) Tunneling is a transformation
using snake like motion.
(3) A new method for selecting a
head meta-module H that goes to the
adjacent unfilled space in goal configuration (D) and the tail meta-module T
is based on the method by Vassilvitskii [1], but additionally uses a set Up of the positions that are
once used as D and H. Up
acts like a single overlapped part between the current configuration and G. Up
is initialized to contain all positions of one of the S ![]() G parts at the beginning
of the reconfiguration process. Every time each tunneling step motion is
carried out, D is added to Up. When Up becomes adjacent to the position in one of the S
G parts at the beginning
of the reconfiguration process. Every time each tunneling step motion is
carried out, D is added to Up. When Up becomes adjacent to the position in one of the S ![]() G parts that are not
included in Up, all filled
positions connected to Up
via G are added to Up. H is selected only from Up,
and T is never selected from Up.
G parts that are not
included in Up, all filled
positions connected to Up
via G are added to Up. H is selected only from Up,
and T is never selected from Up.
Tunneling
meta-module control for Limited Sliding Cubic module: (See DARS2018, ICRA2017 papers)
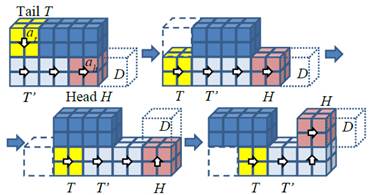
(4) We introduce Void Control
method to implement a tunneling step motion using sliding cubes. A void is
generated in the tunneling head H
when one of the modules in H goes to
the destinastion D. The generated
void is navigated to T and ejected
from T. Eight voids generation order
in H is defined so as to keep the
connectivity in H, D, and T. The proposed void generation order is available even in the case
where H and T are adjacent, and this realizes the completeness of the tunneling
for arbitrary size of the robot structure.
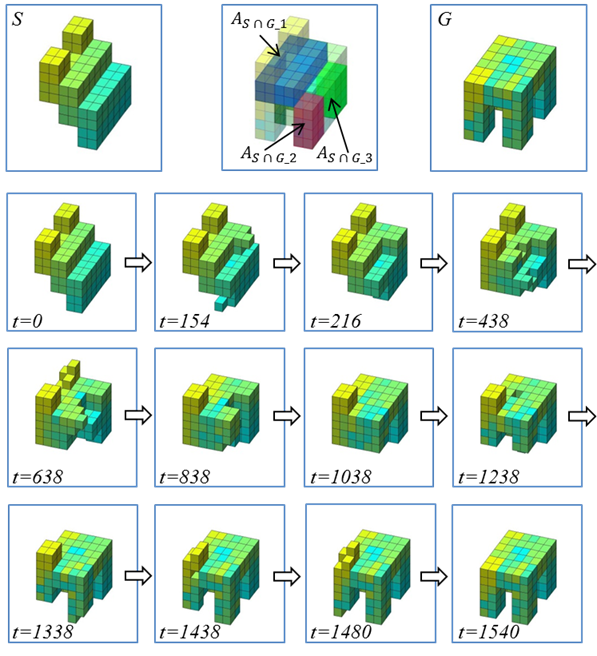
(5) An example of the tunneling
reconfiguration between overlapped S
and G with multiple overlapped parts.
Permutation
method for Limited Sliding Cubic module: (See ICRA2017 papers)
(6) The permutation is carried out
in the goal configuration after the tunneling transformation from the stat to
the goal configuration. Only four modules are ejected from G to S in order to make
the void spaces for position exchanging inside G. It is guaranteed that S
- S ![]() G has at least one
meta-modules position because S
G has at least one
meta-modules position because S ![]() G. Therefore, the permutation
process only need spaces provided by S
G. Therefore, the permutation
process only need spaces provided by S
![]() G.
G.
(7) The permutation is the
repetition of the two modules position exchange using two void space in the
goal configuration.
・Position exchange of two modules
using two voids in a line and a corner.
・Two modules in arbitrary relative
positions are exchanged by combining the position exchanges in the line and the
corner.
Tunneling
method that prevents meta-module disassembling: (See RAS paper)
(8) We have also proposed a
tunneling method that prevent each meta-module from disassembling through the
tunneling process.
The tunneling motion in which the
same meta-module with a camera keeps going ahead as the head meta-module
repeatedly is available by the method.
Reference
[1] S. Vassilvitskii, M. Yim, J.
Suh, “A Complete, Local and Parallel Reconfiguration Algorithm for Cube Style
Modular Robots,” in Proc.2002 IEEE Int. Conf. Robotics and Automation, pp.
117-122, Washington DC, May, 2002.
Last
Updated on 2020.01.07