Linear
Heterogeneous Reconfiguration of Cubic Modular Robots
via Simultaneous
Tunneling and Permutation
Hiroshi Kawano
The results of this topic have
been published in IEEE T-RO(PDF) and ICRA2019 (PDF).
Abstract: Reconfiguring heterogeneous modular robots in which all modules are not
identical is much more time consuming than reconfiguring homogeneous ones,
because ordinary heterogeneous reconfiguration is a combination of homogeneous
transformation and heterogeneous permutation. While linear homogeneous
transformation has been accomplished in previous research, linear heterogeneous
permutation has not. The permutation process is in fact, the simple repetition
of position exchange of modules in fully filled solid goal configuration or
additional intermediate configuration. and is much time consuming. This
research studies a reconfiguration algorithm for heterogeneous lattice modular
robots with linear operation time cost. The algorithm is based on simultaneous
tunneling and permutation, where a robot transforms its configuration via
tunneling motion while permutation of each module’s position is performed
simultaneously during the tunneling transformation. To achieve this, we
introduce the idea of a transparent meta-module that allows modules belonging
to a meta-module to pass through the spaces occupied by other meta-modules. We
provide the proposed algorithm in both centralized and distributed form. We
also prove the correctness and completeness of the proposed algorithm for a 2![]() 2
2![]() 2 cubic meta-module-based connected robot structure. We also show
examples of the reconfiguration simulations of heterogeneous modular robots by
the proposed algorithm.
2 cubic meta-module-based connected robot structure. We also show
examples of the reconfiguration simulations of heterogeneous modular robots by
the proposed algorithm.
(1)
Homogeneous or Heterogeneous?
Homogeneous Reconfiguration:
All modules are supposed to be identical.
Therefore, the strict target position of each module is not defined in the goal
configuration.
The reconfiguration algorithm
only controls whole shape of the robot configuration.
Separate
Permutation after Homogeneous
Transformation is
required.
Heterogeneous
Reconfiguration:

All modules are supposed NOT to
be identical. Therefore, each module has the strict target position in the goal
configuration.
The reconfiguration algorithm
navigates all modules to go to their specified target position in the goal
configuration.
(2)
Research Objective
While
linear homogeneous reconfiguration has been accomplished in previous research, linear
heterogeneous reconfiguration has not. This is because ordinary heterogeneous
reconfiguration is a combination of homogeneous transformation and
heterogeneous permutation. The permutation process is in fact, the simple
repetition of position exchange of modules in fully filled solid goal
configuration or additional intermediate configuration and is much time
consuming. So we propose a method that solves the problem concerning the time
consuming separate permutation. The proposed algorithm is based on simultaneous
tunneling and permutation, where a robot transforms its configuration via
tunneling motion while permutation of each module’s position is performed
simultaneously during the tunneling transformation.
(3)
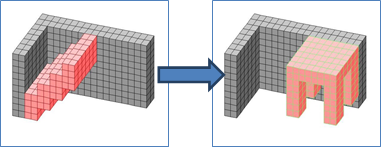
Tunneling based transformation.
In tunneling based
transformation, the robot changes its configuration by snake like motion. All
modules in the tunneling snake follow the motion of the module at the tunneling
head. Such a transformation approach has an advantage in saving space during
the reconfiguration process. We can intuitively understand that the
reconfiguration needs only the space provided by the start and goal configurations.
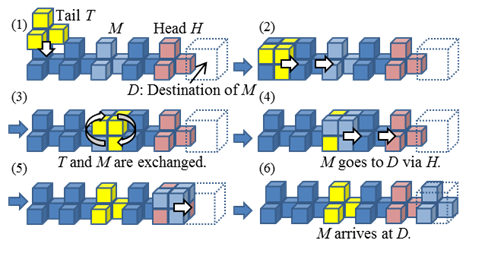
(4)Simultaneous
Tunneling and Permutation
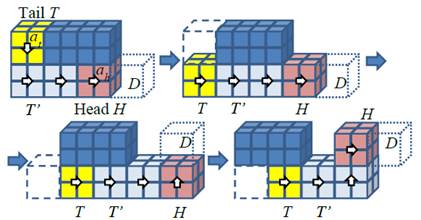
We introduce the idea of the transparent meta-module (hereafter TMM) to
realize simultaneous tunneling and permutation to solve the problem. A TMM is
defined to have void spaces inside it that allow the modules from other TMMs to
pass through it (we call this property “transparency”). Let’s consider the case
where a tunneling snake composed of TMMs contains a module whose target
position is D. Because all TMMs are
“transparent”, each module in the TMM snake can pass through other TMMs.
Therefore, if the target position of the tail T is D, T can navigate to its target position D via void spaces in the TMMs in the
snake. Even in cases where the target position of the TMM at the middle of the
snake (M in the Figure) is D, we can navigate M to D by first letting
the tail T go inside of M, then carrying out the position
exchange between T and M, and finally letting M go to D. In these processes, tunneling and permutation are carried out
simultaneously, and spaces outside the snake are not used. The time cost for
one step motion of the tunneling (the motion where the tail T goes to D.) is linear whether the position exchange is carried out or not.
If such tunneling processes are carried out in a constant time interval
independent from the number of modules, the whole reconfiguration process takes
linear operating time cost.
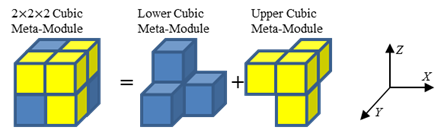
(5)
Position Exchange of Transparent Cubic Meta-Modules.
Position
exchange between two Transparent Cubic Meta Modules (TCMMs) is carried out in
two adjacent 2 ![]() 2
2 ![]() 2 cubic spaces. Suppose the
red TCMM and the yellow TCMM shown in the figures are to be exchanged. Fig. 1
shows the case where the direction from the red TCMM to the yellow TCMM is
positive in the X, Y, or Z coordinate when position exchange starts [Fig. 1 (0)] (hereafter
CASE+), and Fig. 2 shows the case where the direction from the red TCMM to the
yellow TCMM is negative in the X, Y, or Z coordinate when position exchange starts [Fig. 2 (0)] (hereafter
CASE-). In CASE+, no disconnection occurs for any arrangement of the LTCMMs
adjacent to the yellow LTCMM; however, in CASE-, disconnection occurs when the
yellow LTCMM has an adjacent LTCMM in the negative direction of the X, Y
or Z axis. Therefore, before the red
TCMM arrives at the neighbor position of the yellow TCMM, the arrangement of
the TCMMs adjacent to the yellow TCMM must be checked before the start of the
position exchange process. Whether CASE+ or CASE- is used is decided based on
the result of the checking. Considering this, we propose a position exchange
algorithm for TCMMs as follows:
2 cubic spaces. Suppose the
red TCMM and the yellow TCMM shown in the figures are to be exchanged. Fig. 1
shows the case where the direction from the red TCMM to the yellow TCMM is
positive in the X, Y, or Z coordinate when position exchange starts [Fig. 1 (0)] (hereafter
CASE+), and Fig. 2 shows the case where the direction from the red TCMM to the
yellow TCMM is negative in the X, Y, or Z coordinate when position exchange starts [Fig. 2 (0)] (hereafter
CASE-). In CASE+, no disconnection occurs for any arrangement of the LTCMMs
adjacent to the yellow LTCMM; however, in CASE-, disconnection occurs when the
yellow LTCMM has an adjacent LTCMM in the negative direction of the X, Y
or Z axis. Therefore, before the red
TCMM arrives at the neighbor position of the yellow TCMM, the arrangement of
the TCMMs adjacent to the yellow TCMM must be checked before the start of the
position exchange process. Whether CASE+ or CASE- is used is decided based on
the result of the checking. Considering this, we propose a position exchange
algorithm for TCMMs as follows:
Exchange(T1, T2):
1: Suppose T1
is a movable LTCMM in R, or
T1 is a moving UTCMM in R and T1 forms a CMM with a LTCMM in R.
2: If T2 has at least one adjacent
LTCMM Tnext in the negative direction of
the X, Y, or Z axis from T2 in R, and Tnext
![]() T1, then
T1, then
Move T1
to the position of Tnext via optimal path in R.
Carry
out position exchange of T1
and T2 by CASE+.
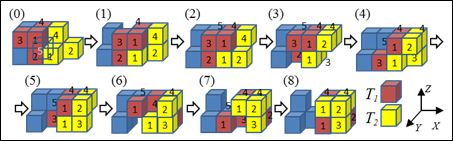 Figure 1. (T1 is red, and T2
is yellow.)
Figure 1. (T1 is red, and T2
is yellow.)
3: Else,
Suppose Tnext
![]() T1, and Tnext is adjacent to T2.
T1, and Tnext is adjacent to T2.
Move
T1 to the position of Tnext via optimal path in R.
Carry
out position exchange of T1
and T2 by CASE-.
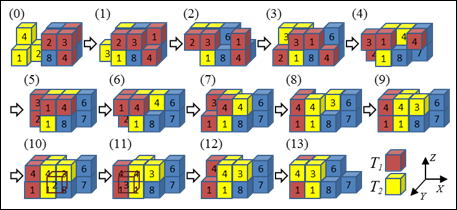 Figure 2 (T1
is red, and T2 is
yellow.)
Figure 2 (T1
is red, and T2 is
yellow.)
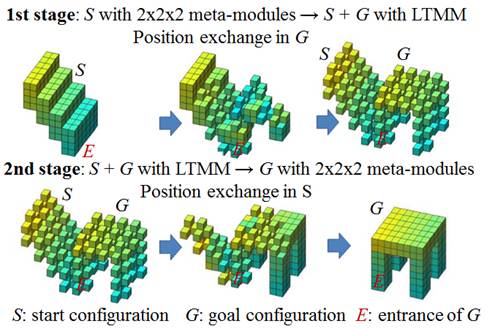
(6)
Whole structure of the algorithm
Let’s
consider the reconfiguration of the 2x2x2Cubic Meta Module (CMM) based robot
structure via simultaneous tunneling and permutation. A fully filled CMM-based
structure has no spaces inside it through which TCMMs pass. Therefore, the
reconfiguration algorithm must provide the spaces for their position exchange.
We proposed the method that provides the space for TMM based position exchange
using the space of both the start and goal configurations. The main strategy of
the reconfiguration consists of two stages as follows:
First stage: The robot structure in the start configuration S is decomposed into S + G
(G is the goal configuration)
composed of Lower Cubic Meta-Modules (LCMM). Each Upper Cubic Meta-Module
(UCMM) in S goes to its target position in G via one entrance position of G
(hereafter, E). The UCMM in fully
filled 2x2x2 CMM in S with the
current smallest Manhattan distance from E
priorly starts its navigation. Position exchange is
executed in G.
Second stage: S +
G are merged to G with 2x2x2 CMMs. Each LCMM in S goes to its target position via E. The LCMM in S with its
target position that has the largest Manhattan distance from E priorly
starts its navigation. Position exchange is executed in S.
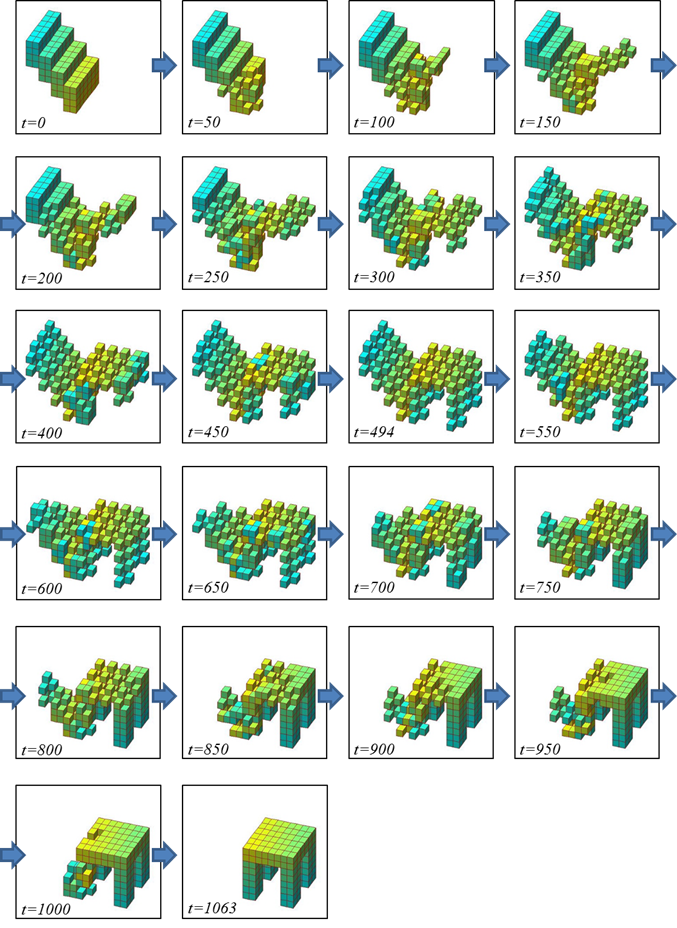
(7)
Reconfiguration Example

Last
Updated on 2019.12.20