
プログラム / 講演・研究展示一覧 /

言葉や身振りにより人と会話するロボットが,人と情報環境の間の親しみやすいインターフェースとして,さりげなく人をサポートしたり円滑にインタラクションを進めるためには,煩わしさを感じさせない気の利いた<間>で行動することが重要です.
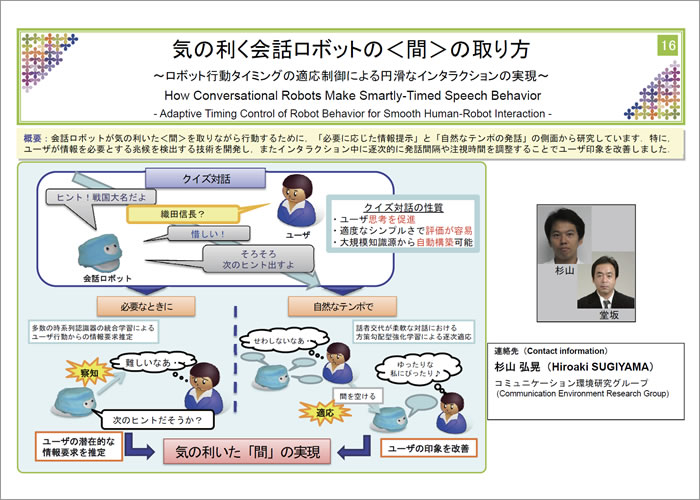
本展示では,この「気の利いた<間>」を実現する新技術として,1)ユーザが情報を必要とする兆候を察知して情報提示タイミングを決める「必要に応じた情報提示」 2)ユーザ評価に基づいて発話間隔等を調整する「自然なテンポの発話」の2つの側面から,多数の時系列認識器の統合学習によるユーザ行動からの情報要求推定,方策勾配型強化学習に基づく発話間隔等の逐次適応についてご説明します.
本展示では,この「気の利いた<間>」を実現する新技術として,1)ユーザが情報を必要とする兆候を察知して情報提示タイミングを決める「必要に応じた情報提示」 2)ユーザ評価に基づいて発話間隔等を調整する「自然なテンポの発話」の2つの側面から,多数の時系列認識器の統合学習によるユーザ行動からの情報要求推定,方策勾配型強化学習に基づく発話間隔等の逐次適応についてご説明します.
展示パネル
画像をクリックするとPDF版が開きます

