
Kawano
Hiroshi, Ph.D
The one who
respects others is to be respected.
The one who has
learned something from someone is to be asked to teach something to someone
else.
I would like to
enjoy taking part of such a beautiful chain.
I have learned all
papers listed in the reference of my papers with highest respect to all authors
of the papers.
I am very glad if someone finds my paper
and is interested in my research works.
![]()
![]()

Latest News!
Papers,
Conferences, Interactions... :
2020.05.31:
ICRA2020 @
Paris: Paper presentation @ Virtual
Conference.
2020.02.11:
Elsevier RAS:
Paper publication.
2020.02.11:
IEEE T-RO:
Paper publication.
2019.05.20:
ICRA2019 @
Montreal: Presentation in Cellular and Modular Robots -
1.1.09 session.
2018.10.17: DARS2018 @ Boulder: Oral presentation.
in Modular
Robots and Programmable Matters session.
2018.05.30:
I visited University of Technology Sydney.
2018.05.22:
ICRA2018 @
Brisbane: Poster presentation in Late Breaking
Poster Session 1.
2017.05.30:
ICRA2017 @
Singapore: Presentation in Multi-Robot Systems 2 session.
2016.05.30:
I visited South Denmark University Bio Robotics Centre and made a presentation.
2016.05.25:
I visited EPFL Bio Robotics Laboratory and made a presentation.
2016.05.19:
ICRA2016 @
Stockholm: Presentation and taking
charge of session Co-Chair in Cellular and Modular Robots session.
2015.09.29:
IROS2015 @ Hamburg:
Presentation in Cellular and Modular Robots session.
2013.10.13:
SMC2013 @ Manchester:
Presentation in Technical session.
2013.05.07:
ICRA2013 @
Karlsruhe: Presentation in Interactive
Session Tuesday II.
Patents:
2022.04.05:
My 98th patent has been applied (Sorry, the detail is undisclosed ).
2022.01.24:
My 75th patent has been
registered.
2021.05.10: My 70th
patent has been registered.
2018.08.29: My 90th
patent has been applied. (Sorry, the detail is undisclosed.).
2018.02.09: My 60th
patent has been registered.
2017.03.08: My 80th
patent has been applied (Sorry, the detail is undisclosed.).
2014.09.01: My 70th
patent has been applied (Sorry, the detail is undisclosed.).
2013.06.14: My 50th
patent has been registered.
![]()
![]()
My Research Topics
Keywords: modular robotics,
cooperative robotics, distributed robotics, computational geometry, motion
planning, reinforcement learning, MDPs, advanced actuators, aerial robotics...
|
I
am now interested in the research of computational geometrical application to
robotics. The problem concerns one of the most essential questions, �gWhat is intelligence?�h. The ordinary
AI based searching method requires exponentially increasing calculation cost
for solving the problem managing motions with high degree of freedom. The
answer for �gHow can we reduce such a high calculation cost to practical one?�h
is in the kinematics of robots. As many previous researches have shown, analysis
of the kinematical properties of robots is the gateway to the solution. Such
results concur with the idea of embodiment �gIntelligence needs a body�h. Yes, �grobot itself�h knows the answer!
Now I am looking for the essence of intelligence lying in the kinematics of
robots with high degree of freedom. |
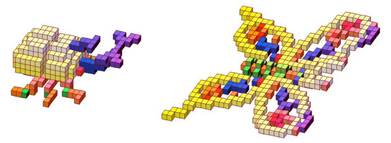
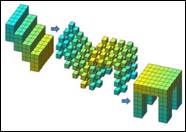
1. Full Resolution
Reconfiguration of Sliding-Only Cubic-Modular Robots (Summary)
![]()

2. Linear
Heterogeneous Tunneling Reconfiguration of Cubic-Modular Robots (Summary)

3. Tunneling-based
Cubic-Modular Robot Reconfiguration in Severe Space Requirement (Summary)
4. Multi-agent
Reinforcement Learning for Multi-Robot Work Delivery Mission (Summary)
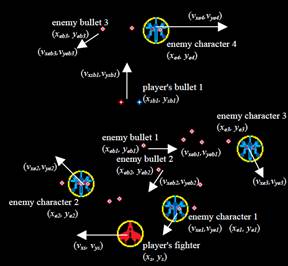
5. AI in Shooting
Games
 Under construction�c
Under construction�c
6. MDP-based
Motion Planning of Under-actuated UAV and AUV
 Under constrcution...
Under constrcution...
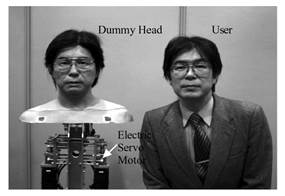
7. Application of
Multi-DOF Ultrasonic Motor to �gTele-Head�h
 Under construction...
Under construction...
8. Recessless
Screws
 Under construction...
Under construction...
![]()
![]()
Publication
List
��Journal Papers
��Cubic
Modular Robot Reconfiguration
��IEEE T-RO: Peer-Reviewed Full Paper
Kawano H., :
�gDistributed Linear
Heterogeneous Reconfiguration of Cubic Modular Robots via Simultaneous
Tunneling and Permutation�h,
IEEE Transactions
on RObotics,
*0Evolved version from my paper presented @ ICRA2019,
Vol. 36, Issue
1, pp. 62-77, Feb. 2020.
��Elsevier
RAS: Peer-Reviewed Full Paper
Kawano H., :
�gDistributed Tunneling
Reconfiguration of Cubic Modular Robots without Meta-module�fs
Disassembling in Severe Space Requirement�h,
Journal Robotics and Autonomous Systems (Elsevier),
*1Special issue of �gRecent Advances in Distributed Autonomous Robotic Systems�h,
Vol. 124, Feb.
2020.
��MDP
applications for Unmanned Aerial Vehicles
��JRM: Peer-Reviewed Full Paper
Kawano
H., :
�gThree-dimensional Obstacle Avoidance of Blimp-type Unmanned Aerial
Vehicle Flying in Unknown and Non-uniform Wind Disturbance�h,
JSME
Journal of Robotics and Mechatronics,
*2Special
issue on �gSelected Papers from ROBOMECH�f06
(Part 1)�h
Vol.19 No.2, pp.166-173, April, 2007.
��Multi-DOF
Ultrasonic motor
��IEEE T-RO: Peer-Reviewed Full Paper
Kawano H., Ando
H., Hirahara T., Yun C., Ueha S., :
�gApplication of
a Multi-DOF Ultrasonic Servomotor in an Auditory Tele-existence Robot�h,
IEEE Transactions
on RObotics,
*3More detailed version of my papers presented @ ICRA2004 and IROS2003,
Vol.12, No.5,
pp.790-800, October. 2005.
��Recessless
Screw
��JRM: Peer-Reviewed Full Paper
Kawano, H., Ando,
H., :
�gDevelopment of
a Piezo Electric Screwdriver for Recessless Screws�h,
JSME
Journal of Robotics and Mechatronics,
*3Special
issue on �gSelected Papers from ROBOMECH�f04
(Part 2)�h
Vol.17, No.3,
pp.352-358, Jun, 2005.
��Conference
Proceedings
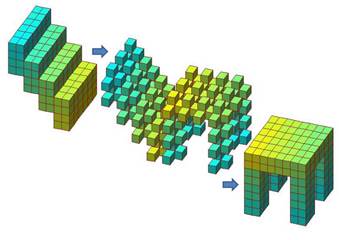
��Full-resolution
Reconfiguration of Sliding-ONLY Cubic Modular Robots (2016-)
![]()

��ICRA 2020: Peer-Reviewed Full Paper,
Kawano, H., :
�gParallel Permutation for Linear Full
Resolution Reconfiguration of Heterogeneous Sliding-only Cubic Modular Robots�h,
2020
IEEE International Conference on Robotics and Automation,
pp.8281-8287, May 2020, Paris, France.
��ICRA 2016: Peer-Reviewed Full Paper,
Kawano, H., :
�gFull Resolution Reconfiguration
Planning for Heterogeneous Cube-shaped Modular Robots with only Sliding Motion
Primitive�h,
2016
IEEE International Conference on Robotics and Automation,
pp.5222-5229, May 2016, Stockholm, Sweden.
��Linear
Heterogeneous Reconfiguration of Modular Robots (2019-)
��ICRA 2019: Peer-Reviewed Full Paper,
Kawano, H., :
�hLinear
Heterogeneous Reconfiguration of Cubic Modular Robots via Simultaneous
Tunneling and Permutation�h,
2019 IEEE International Conference on Robotics and Automation,
*0Evolved version is published in IEEE T-RO,
pp.332-338, May 2019, Montreal, Canada.
��Tunneling-based
Modular Robots Reconfiguration in Sever Space Reqiurement(2015-)

��DARS 2018: Peer-Reviewed Full Paper for Oral Session,
Kawano, H., :
�hDistributed
Tunneling Reconfiguration of Sliding Cubic Modular Robots in Severe Space
Requirements�h,
14th International
Symposium on Distributed Autonomous Robotic Systems,
*1Selected for the special issue of �gRecent Advances in Distributed Autonomous Robotic Systems�h, journal RAS (Elsevier).
pp.1-15 in Springer Proceedings in Advanced Robotics, October 2018, Boulder, Colorad, US.
��ICRA 2018: Extended-Abstract for Late Breaking Poster Session,
Kawano, H., :
�hTunneling
Reconfiguration of Cubic Modular Robots without Meta-modules Disassembling�h,
2018 IEEE International Conference on Robotics and Automation,
May 2018, Brisbane, Australia.
��ICRA 2017: Peer-Reviewed
Full Paper,
Kawano, H., :
�hTunneling-Based
Self-Reconfiguration of Heterogeneous Sliding Cube-Shaped Modular Robots in
Environments with Obstacles�h,
2017 IEEE International Conference on Robotics and Automation,
pp.825-832, May 2017, Singapore.
��IROS
2015: Peer-Reviewed Full Paper,
Kawano, H., :
�gComplete Reconfiguration Algorithm for
Sliding Cube-shaped Modular Robots with only Sliding Motion Primitive�h,
2015
IEEE/RSJ International Conference on
Intelligent RObots and Systems,
pp.3276-3283, September 2015, Hamburg,
Germany.
��Warehouse
Cooperative Robotics via MDP-based Motion Planning (2013-)
��SMC 2013: Peer-Reviewed
Full Paper,
Kawano, H., :
�gEffect of Virtual Work braking on Distributed
Multi-Robot Reinforcement Learning�h,
2013 IEEE International Conference on Systems,
Man, and Cybernetics,
pp.1987-1994,
October 2013, Manchester, UK.
��ICRA 2013: Peer-Reviewed Full Paper,
Kawano,
H., :
�gHierarchical
sub-task Decomposition for Reinforcement Learning of Multi-Robot Delivery
Mission�h,
2013
IEEE International Conference on Robotics and Automation,
pp.820-827, May, 2013, Karlsruhe, Germany.
��AI in
Shooting Games (2006-2007)

��AIA 07: Peer-Reviewed Full Paper,
Kawano,
H., :
�gMethod for Determining The Difficulty
of Shooting Game and Improving The Intelligence in Enemy�fs Bullet Firing�h,
2007 IASTED Artificial Intelligence and Applications,
pp.261-266,
February, 2007, Innsbruck, Austria.
��MDP
applications for Unmanned Aerial Vehicles (2005-2011)

��AIM 2011: Peer-Reviewed Full Paper,
Kawano, H., :
�gStudy of Path Planning Method for Under-actuated
Blimp-type UAV in Stochastic Wind Disturbance via Augmented-MDP�h,
2011
IEEE/ASME International Conference on Advanced Intelligent Mechatronics,
pp.180-185,
July, 2011, Budapest, Hungary.
��ICRA 2007: Peer-Reviewed Full Paper,
Kawano, H.,
:
�gMethod for Designating the Wind Condition in
MDP-based Motion Planning of Under-actuated Blimp type UAV�h,
2007
IEEE International
Conference on Robotics and Automation,
pp1049-1055, April, 2007, Roma, Italy.
��IROS 2006: Peer-Reviewed Full Paper,
Kawano,
H., :
�gThree Dimensional Obstacle Avoidance of Autonomous Blimp
Flying in Unknown Disturbance�h,
2006
IEEE/RSJ International
Conference on Intelligent RObots and Systems,
pp.3024-3031,
October, 2006, Beijing, China.
��IROS 2006: Peer-Reviewed Full Paper,
Kawano, H., :
�gReal-time Obstacle Avoidance of Underactuated Autonomous Underwater
Vehicles in Unknown Vortex Sea Flow by the MDP Approach�h,
2006 IEEE/RSJ International Conference on Intelligent RObots and Systems,
pp.123-130, October 2006, Beijing,
China.
��IROS 2005: Peer-Reviewed Full Paper,
Kawano, H., :
�hMethod for Applying
Reinforcement Learning to Motion Planning and Control of Under-actuated
Underwater Vehicle in Unknown Non-uniform Sea flow�h,
2005 IEEE/RSJ International
Conference on Intelligent RObots and Systems,
pp.146-152, August, 2005, Edmonton, Canada.
��CIRA 2005:
Peer-Reviewed Full Paper,
Kawano, H., :
�gApplication of Single Neuron Model to Motion Planning and Control
of Under-actuated Robot by MDP Frame Work�h,
2005
IEEE International Symposium on Computational Intelligence in Robotics
and Automation,
pp.237-242, Jun, 2005, Helsinki, Finland.
��Recessless
Screws(2004-2005)

��TexCRA 2004: Short Paper,
Kawano H., Ando
H., :
�gApplication of a
Piezo-electric Actuator to Tamper
Resistant Recessless Screws�h,
The
1st IEEE Technical Exhibition Based Conference on Robotics
and Automation,
November, 2004,
Tokyo, Japan.
��IROS 2004:
Peer-Reviewed Full Paper,
Kawano
H., Ando H., :
�gStudy of a Recessless Screw and a Piezo
Electric Screwdriver�h,
2004
IEEE/RSJ International Conference on
Intelligent RObots and Systems,
pp.903-907,
September, 2004, Sendai, Japan.
��Multi-DOF
Ultrasonic motor (2003-2004)

��ICRA
2004: Peer-Reviewed Full Paper,
Kawano,
H., Ando H., Hirahara, T., :
�gFast Three-DOF
Control for Multi-DOF Ultrasonic Servo Motor by Online Adaptation�h,
2004 IEEE International
Conference on Robotics and Automation,
*3Detailed version is published in IEEE T-RO,
pp.
3087-3092, April 2004, New Orleans, Mississippi, US.
��ICA 2004: Short Paper,
Kawano,
H., Ando H., Hirahara, T., :
�gPre-loading Mechanism and Angular
Positioning Control Algorithm for Multi-DOF Ultrasonic Motor with a Weight
Load�h,
The 18th International Congress
on Acoustics,
pp. I.569-572,
April, 2004, Kyoto, Japan.
��IROS 2003:
Peer-Reviewed Full Paper,
Kawano, H., Ando
H., Hirahara, T., :
�gThree-DOF Angular
Positioning Control using a Multi-DOF Ultrasonic Motor in the Pre-loaded Condition
- Application to the Auditory Tele-Existence Robot �gTeleHead�h–�g,
*3Detailed version is published in IEEE T-RO,
2003 IEEE/RSJ International Conference on Intelligent
RObots and Systems,
pp. 2247-2253,
October, 2003, Las Vegas, Nevada, US.
��Autonomous
Underwater Vehicles (2001-2002)
��IROS 2002: Peer-Reviewed Full Paper,
Kawano,
H., Ura, T., :
�gFast Reinforcement
Learning Algorithm for Motion Planning of Nonholonomic Autonomous Underwater
Vehicle in Disturbance�h,
2002 IEEE/RSJ International Conference on Intelligent
RObots and Systems,
pp. 903–908,
vol.1, September, 2002, Lausanne, Switzerland.
��ICRA 2002: Peer-Reviewed Full Paper,
Kawano,
H., Ura, T., :
�gMotion Planning
Algorithm for Nonholonomic Autonomous Underwater Vehicle in Disturbance using
Reinforcement Learning and Teaching Method�h,
2002
IEEE/ASME International Conference
on Robotics and Automation,
pp. 4032-4038,
May, 2002, Washington DC, US.
��OCEANS 2001: Full Paper,
Kawano, H., Ura,
T., :
�gNavigation
Algorithm for Autonomous Underwater Vehicle Considering Cruising Mission using
a Side Scanning SONAR in Disturbance�h,
2001 MTS/IEEE COnferenCE ANd Exhibition,
pp. 403-408,
September, 2001, Honolulu, Hawaii, US.
��IROS 2001: Peer-Reviewed Full
Paper,
Kawano,
H., Ura, T., :
�gDynamics Control
Algorithm of Autonomous Underwater Vehicle by Reinforcement Learning and
Teaching Method Considering Thruster Failure under Severe Disturbance�h,
2001 IEEE/RSJ International Conference on Intelligent
RObots and Systems,
pp. 974-979,
September, 2001, Maui, Hawaii, US.
��UUST
2001: Full Paper,
Kawano, H., Ura,
T., :
�gAcquisition of
Dynamics Control Algorithm of Autonomous Underwater Vehicle by Reinforcement
Learning and Teaching Method Considering Thruster Failure�h,
2001 Unmanned
Untethered Submersible Technology,
August, 2001,
Durham, New Hampshire, US.
��Patents
��International
Patents
04. Registered on 2011.07.22, Kawano H., PCT P.R.China, 200910134730.X �gScrews�h
03. Registered on 2011.03.29, Kawano
H., PCT USA, 3282US, �gScrews�h
02. Registered on 2010.01.11, Kawano H.,
Hirahara T., PCT USA, 12/430,949(3281US),�@�gUltrasonic Screw Driver�h
01. Registered on 2009.02.20, Kawano
H., PCT P.R.China, 200580002731.9, �gScrew Driver and
Screws�h
��Japanese
Domestic Patents
(Patent application documents are written in Japanese. �g��� �m�h is my name in Japanese.)
98-76. �FUnder
Inspection.
�F�R���҂���
75. Registered on 2022.01.24. Applied on 2018.08.29. (Related Paper is published in IEEE T-RO)
�@�FPatent Application No. 2018-160144, Kawano H., �gMobile robots, control methods
for mobile robots, and its computer programs�h,
�@�F����2018-160144�A���@�m�A�u�ړ����{�b�g�A�ړ����{�b�g�̐�����@�y�уv���O�����v
74. Registered on 2022.01.24. Applied on 2018.08.24. (Related Paper is published in DARS 2018)
�@�FPatent Application No. 2018-157544, Kawano H., �gMobile robots, control methods
for mobile robots, and its computer programs�h,
�@�F����2018-157544�A���@�m�A�u�ړ����{�b�g�A�ړ����{�b�g�̐�����@�y�уv���O�����v
73. Registered on 2021.09.21. Applied on 2017.10.30.
�@�FPatent Application No. 2017-209151, Kawano H., �gControlling systems, methods, and
its computer programs�h,
�@�F����2017-209151�A���@�m�A�u�������䑕�u�A������@�A����уv���O�����v
72. Registered on 2021.09.06. Applied on 2017.10.18. (Related Paper is published in DARS 2018 and Elsevier
RAS)
�@�FPatent Application No. 2017-201936, Kawano H., �gControlling systems, methods, and
its computer programs�h,
�@�F����2017-201936�A���@�m�A�u���䑕�u�A���@�y�уv���O�����v
71. Registered on 2021.09.06. Applied on 2017.10.18.
�@�FPatent Application No. 2017-202115, Kawano H., �gControlling systems, methods, and
its computer programs�h,
�@�F����2017-202115�A���@�m�A�u�������䑕�u�A������@�A����уv���O�����v
70. Registered on 2021.05.10. Applied on 2018.03.05. (Related Paper is published in ICRA2019 and IEEE-TRO)
�@�FPatent Application No. 2018-038194, Kawano H., �gControlling systems, methods, and
its computer programs�h,
�@�F����2018-038194�A���@�m�A�u���䑕�u�A���@�y�уv���O�����v
69. Registered on 2020.10.12. Applied on 2018.02.14. (Related Paper is published in DARS
2018 and Elsevier
RAS)
�@�FPatent Application No. 2018-024182, Kawano H., �gControlling systems, methods, and
its computer programs�h,
�@�F����2018-024182�A���@�m�A�u���䑕�u�A���@�y�уv���O�����v
68. Registered on 2020.04.03. Applied on 2017.03.08. (Related Paper is presented @ ICRA2017)
�@�FPatent Application No. 2017-044320, Kawano H., �gPermutation controlling systems,
methods, and its computer programs�h,
�@�F����2017-044320�A���@�m�A�u����Ώە�����ւ�����V�X�e���A����Ώە�����ւ�������@�A�v���O�����v
67. Registered on 2019.12.20. Applied on 2016.07.14. (Related Paper is presented @ ICRA2017)
�@�FPatent Application No.
2016-139010, Kawano
H., �gAction controlling systems, methods, and its computer programs�h,
�@�F����2016-139010�A���@�m�A�u�s������V�X�e���A�s��������@�A�v���O�����v
66. Registered on 2019.07.26. Applied on 2016.02.12. (Related Paper is presented @ ICRA2017)
�@�FPatent Application No. 2016-025007, Kawano H., �gAction controlling systems,
methods, and its computer programs�h,
�@�F����2016-025007�A����@�m�A�u�s������V�X�e���A���̕��@�y�уv���O�����v
65. Registered on 2019.07.26. Applied on 2016.01.19. (Related Paper is presented @ ICRA2016)
�@�FPatent Application No. 2016-007760, Kawano H., �gAction controlling systems,
methods, and its computer programs�h,
�@�F����2016-007760�A����@�m�A�u�s������V�X�e���A���̕��@�y�уv���O�����v
64. Registered on 2019.07.12. Applied on 2016.07.13. (Related Paper is presented @ ICRA2017)
�@�FPatent Application No. 2016-138123, Kawano H., �gPosition exchange controlling
systems, methods, and its computer programs�h
�@�F����2016-138123�A����@�m�A�u����Ώە��ʒu����ւ����u�A����Ώە��ʒu����ւ�������@�A�v���O�����v
63. Registered on 2019.03.08. Applied on 2015.05.01. (Related Paper is presented @ IROS2015)
�@�FPatent Application No. 2015-094398, Kawano H., �gAction controlling systems, and
its computer programs�h
�@�F����2015-094398�A����@�m�A�u�s������V�X�e���A�y�т��̃v���O�����v
62. Registered on 2018.08.31. Applied on 2015.08.12. (Related Paper is presented @ ICRA2016)
�@�FPatent Application No. 2015-1593222, Kawano H., �gAction controlling systems,
methods, and its computer programs�h, (Priority Application No.
2015-16074)
�@�F����2015-1593222�A����@�m�A�u�s������V�X�e���A���̕��@�y�уv���O�����v�A(�D�挠�o�� ����2015-16074)
61. Registered on 2018.08.31. Applied on 2015.01.29.
�@�FPatent Application No. 2015-16074, Kawano H., �gAction controlling systems,
methods, and its computer programs�h
�@�F����2015-16074�A����@�m�A�u�s������V�X�e���A���̕��@�y�уv���O�����v
60. Registered on 2018.02.09. Applied on 2014.11.17.
�@�FPatent Application No. 2014-232549, Kawano H., �gAction controlling systems,
methods, and its computer programs�h
�@�F����2014-232549�A����@�m�A�u�s������V�X�e���A���̕��@�y�уv���O�����v
59. Registered on 2017.11.17. Applied on 2014.04.25. (Related Paper is presented @ SMC2013)
�@�FPatent Application No. 2014-091443, Kawano H., Takano Y., Nakajima S., �gDelivery container, and delivery
system�h
�@�F����2014-091443�A���@�m�A����@�T���A�����@�q�j�A�u�����R���e�i�A�����V�X�e���v
58. Registered on 2017.09.26. Applied on 2014.09.01.
�@�FPatent Application No.
2014-177471, Kawano H., �gAction controlling apparatus,
methods, and its computer programs�h
�@�F����2014-177471�A��� �m�A�u�s�����䑕�u�A���@�y�уv���O�����v
57. Registered on 2017.08.10. Applied on 2014.04.09.
�@�FPatent Application No. 2014-080002,
Kawano H., �gAction controlling apparatus, methods, and
its computer programs�h
�@�F����2014-080002�A��� �m�A�u�s�����䑕�u�A���@�y�уv���O�����v
56. Registered on 2017.07.14. Applied on 2014.06.25.
�@�FPatent Application No. 2014-130021,
Kawano H., �gAction controlling systems, methods, and its
computer programs�h
�@�F����2014-130021�A��� �m�A�u�s������V�X�e���A���̕��@�y�уv���O�����v
55. Registered on 2016.09.02. Applied on 2013.04.17. (Related Paper is presented @ SMC2013)
�@�FPatent Application No. 2013-086240,
Kawano H., �gLogistic control apparatus, method, computer
program for cooperating robots�h
�@�F����2013-086240�A��� �m�A�u���{�b�g���������v�摕�u�A���@�y�уv���O�����v
54. Registered on 2016.05.13. Applied on 2012.10.12. (Related Paper is presented @ ICRA2013)
�@�FPatent Application No. 2012-227349,
Kawano H., �gLogistic control apparatus, method, computer program for
cooperating robots�h
�@�F����2012-227349�A��� �m�A�u���{�b�g���������v�摕�u�A���@�A�v���O�����v
53. Registered on 2014.02.14. Applied on 2010.07.27.
�@�FPatent
Application No. 2010-167768,
Kawano H., �gTrain wheel and rail�h
�@�F����2010-167768�A��� �m�A�u�S���ԗւƃ��[���v
52. Registered on 2013.10.18. Applied on
2010.08.23. (Related Paper is presented @ AIM2011)
�@�GPatent Application No. 2010-185831,
Kawano H., �gMotion planning method, device, and computer program for autonomous
mobile robot�h
�@�F����2010-185831�A��� �m�A�u�����ړ����{�b�g�̓���v����@�`�i�ȉ����j�v
51. Registered on 2013.07.26. Applied on
2010.03.30.
�@�FPatent Application No. 2010-076799,
Kawano H., �gTrajectory tracking device, method, and computer program for robot�h
�@�F����2010-076799�A��� �m�A�u�O���Ǐ]���䑕�u�A���@�y�уv���O�����v
50. Registered on 2013.06.14. Applied on
2009.12.21.
�@�FPatent Application No. 2009-289393,
Kawano H., Kim K., �gOrientation angle
estimation method, apparatus, and computer program for robot�h
�@�F����2009-289393�A��� �m�A�� ���G�A�u���ʊp���葕�u�A���@�y�уv���O�����v
49. Registered on 2012.11.02.
Applied on 2009.05.22.
�@�FPatent Application No. 2009-123840,
Kawano H., Kim K., �gState estimation method, apparatus, computer program, and its recording media for
robot�h
�@�F����2009-123840�A��� �m�A�� ���G�A�u��Ԑ��葕�u�A���@�A�v���O�����y�т��̋L�^�}�́v
48. Registered on 2012.09.07. Applied on
2008.06.09.
�@�FPatent Application No. 2008-15079,
Kawano H., �hMotion planning method, apparatus,
computer program, and its recording media for autonomous mobile robot�h
�@�F����2008-15079�A��� �m�A�u�����ړ����{�b�g�̓���v�摕�u�A���@�`�i�ȉ����j�v
47. Registered on 2012.08.10. Applied on
2007.05.01.
�@�FPatent Application No. 2007-120497,
Kawano H., �gScrew driver and screw fastening method�h
�@�F����2007-120497�A��� �m�A�u�˂��y�т˂��̒��ߕt�����@�v
46. Registered on 2012.05.18. Applied on 2007.02.06.
(Related Paper is presented @ AIA2007)
�@�FPatent Application No. 2007-026434,
Kawano H., �gDifficulty decision method, apparatus, computer program, and its
recording media for shooting video game�h
�@�F����2007-026434�A��� �m�A�u��Փx������@�A���u�A�v���O�����v
45. Registered on 2012.05.18. Applied on 2007.01.30.
�@�FPatent Application No. 2007-018835,
Kawano H., �gEnemy character control method, apparatus, computer program, and
its recording media for shooting video game�h
�@�F����2007-018835�A��� �m�A�u�G�@�s��������@�A���u�A�v���O�����y�т��̋L�^�}�́v
44. Registered on 2012.05.18. Applied on 2006.06.21.
�@�FPatent Application No. 2006-171740,
Kawano H., �gInformation and data processing method, apparatus, computer
program, and its recording media for shooting video game�h
�@�F����2006-171740�A��� �m�A�u�V���[�e�B���O�Q�[���������@�A���̑��u�A���̃v���O�����y�т��̋L�^�}�́v
43. Registered on 2012.04.20. Applied on 2006.07.25.
�@�FPatent Application No. 2006-202019,
Kawano H., �gPlayer�fs character demonstration method, apparatus, computer
program, and its recording media for shooting video game�h
�@�F����2006-202019�A��� �m�A�u�V���[�e�B���O�Q�[���̃f�����X�g���[�V�����p���@�s��������@�`�i�ȉ����j�v
42. Registered on 2012.04.20. Applied on 2006.06.15.
�@�FPatent Application No. 2006-166301,
Kawano H., �gInformation and data processing method, apparatus, computer
program, and its recording media for shooting video game�h
�@�F����2006-166301�A��� �m�A�u�V���[�e�B���O�Q�[���������@�A���̑��u�A���̃v���O�����y�т��̋L�^�}�́v
41. Registered on 2012.04.06. Applied on 2009.01.13.
�@�FPatent Application No. 2009-004996,
Kawano H., �gMotion plannning device, computer program, and its recording media
for autonomous mobile robot�h
�@�F����2009-004996�A��� �m�A�u�����ړ����{�b�g�̓���v�摕�u�A���@�A�v���O�����y�ыL�^�}�̕��сi�ȉ����j�v
40.
Registered on 2011.09.30. Applied on 2007.09.21.
�@�FPatent Application No. 2007-246252,
Kim K., Kawano H., �gPosition detection device
for flying object�h
�@�F����2007-246252�A���� �G�A��� �m�A�u���đ̂ɔ�������ʒu��o���u�v
39. Registered on 2011.08.19. Applied on 2006.07.25.
�@�FPatent Application No. 2006-202527,
Kawano H., �gPlayer�fs character control method, apparatus, computer program, and
its recording media for shooting video game�h
�@�F����2006-202527�A��� �m�A�u�V���[�e�B���O�Q�[���̎��@������@�A���̑��u�A���̃v���O�����y�т��̋L�^�}�́v
38. Registered on 2011.08.19. Applied on 2006.06.22.
�@�FPatent Application No. 2006-172831,
Kawano H., �gEnemy character control method, apparatus, computer program, and
its recording media for shooting video game�h
�@�F����2006-172831�A��� �m�A�u�V���[�e�B���O�Q�[���̓G�@�U��������@�A���̑��u�A���̃v���O�����y�т��̋L�^�}�́v
37. Registered on 2011.08.19. Applied on 2006.06.02.
�@�FPatent Application No. 2006-155358,
Kawano H., �gDifficulty decision method, apparatus, computer program, and its
recording media for shooting video game�h
�@�F����2006-155358�A��� �m�A�u�V���[�e�B���O�Q�[����Փx������@�A���̑��u�A���̃v���O�����y�т��̋L�^�}�́v
36. Registered on 2011.08.19. Applied on 2006.05.26.
�@�FPatent Application No. 2006-147033,
Kawano H., �gDifficulty decision method, apparatus, computer program, and its
recording media for shooting video game�h
�@�F����2006-147033�A��� �m�A�u�V���[�e�B���O�Q�[����Փx������@�A���̑��u�A���̃v���O�����y�т��̋L�^�}�́v
35. Registered on 2011.08.19. Applied on 2006.05.24.
�@�FPatent Application No. 2006-143814,
Kawano H., �gInformation and data processing method, apparatus, computer
program, and its recording media for shooting video game�h
�@�F����2006-143814�A��� �m�A�u�V���[�e�B���O�Q�[���������@�A���̑��u�A���̃v���O�����y�т��̋L�^�}�́v
34. Registered on 2011.08.19. Applied on 2006.05.19.
�@�FPatent Application No. 2006-140177,
Kawano H., �gDifficulty decision method, apparatus, computer program, and its
recording media for shooting video game�h
�@�F����2006-140177�A��� �m�A�u�V���[�e�B���O�Q�[����Փx������@�A���̑��u�A���̃v���O�����y�т��̋L�^�}�́v
33. Registered on 2011.05.20. Applied on
2005.05.18. (Related Papers are presented @ IROS2005
& CIRA2005)
�@�FPatent Application No. 2005-145588,
Kawano H., �gRobot action selection device and method�h
�@�F����2005-145588�A��� �m�A�u���{�b�g�s���I�u�y�у��{�b�g�s���I����@�v
32. Registered on 2011.03.18. Applied on
2009.12.11.
�@�FPatent Application No. 2009-281959,
Kawano H., �gScrew�h
�@�F����2009-281959�A��� �m�A�u�l�W�v
31. Registered on 2010.08.20. Applied on 2004.03.22.
�@�FPatent Application No. 2004-082897,
Kawano H., Toshima I., Aoki S., Hirahara T., �gDummy head and high presence
communication apparatus using dummy head�h
�@�F����2004-082897�A��� �m�A�˓��ގ��A�ؖΖ��A�����B��A�u�_�~�[�w�b�h����т����p�������Տꊴ�ʐM���u�v
30. Registered on 2010.07.23. Applied on
2006.02.13.
�@�FPatent Application No. 2006-035039,
Kawano H., �gScrew fastening method and screw�h
�@�F����2006-035039�A��� �m�A�u�˂��̒��߂����@�y�т˂��v
29.
Registered on 2010.07.16. Applied on 2005.12.22.
�@�FPatent Application No. 2006-514468,
Kawano H., �gScrew�h
�@�F����2006-514468�A��� �m�A�u�l�W�v
28. Registered on 2010.05.28. Applied on
2005.02.10.
�@�FPatent Application No. 2005-034745,
Kawano H., �hScrew with male and female recess and
screw driver�h
�@�F����2005-034745�A��� �m�A�u���Y�l�W�@�\����уl�W�v
27. Registered on 2010.05.21. Applied on
2006.01.12.
�@�FPatent Application No. 2006-004593,
Kawano H., �gScrew driver�h
�@�F����2006-004593�A��� �m�A�u�l�W�܂킵���u�v
26. Registered on 2010.04.23. Applied on
2005.05.17.
�@�FPatent Application No. 2005-143343,
Kawano H., �hPre-loading apparatus for multi-DOF
ultrasonic motor with output stiffness adjusting mechanism�h
�@�F����2005-143343�A��� �m�A�u�����R�x�����g���[�^�̏o�͍��������@�\�t�\�����u�v
25. Registered on 2010.04.23. Applied on
2005.07.20.
�@�FPatent Application No. 2005-210161,
Kawano H., Kim K., �hRelaying apparatus for
celler phone�h
�@�F����2005-210161�A���@�m�A���@���G�A�u�g�ѓd�b���p���u�v
24. Registered on 2010.04.16. Applied on 2006.08.24. (Related
Paper is presented @ IROS2006)
�@�FPatent Application No. 2006-227431,
Kawano H., �gRobot control method, apparatus, computer program, and its
recording media�h
�@�F����2006-227431�A��� �m�A�u���{�b�g�̓��쐧����@�A���u�A�v���O�����y�т��̋L�^�}�́v
23. Registered on 2010.04.09. Applied on
2004.10.14.
�@�FPatent Application No. 2004-300704,
Kawano H., �gMulti-DOF driving mechanism�h
�@�F����2004-300704�A��� �m�A�u�����R�x�쓮�@�\�v
22. Registered on 2010.02.19. Applied on
2004.06.09.
�@�FPatent Application No. 2004-171031,
Kawano H., �gBearing and ultrasonic motor�h
�@�F����2004-171031�A��� �m�A�u�x�A�����O����ђ����g���[�^�v
21. Registered on 2010.01.29. Applied on
2005.01.20.
�@�FPatent Application No. 2005-517253,
Kawano H., �gScrew driver�h
�@�F����2005-517253�A��� �m�A�u�l�W���u�v
20. Registered on
2010.01.15. Applied on 2004.03.16. (Related Paper is published in IEEE
T-RO)
�@�FPatent Application No. 2004-074204,
Kawano H., �gOnline machine learning method for realtime input-output
data�h
�@�F����2004-074204�A��� �m�A�u�I�����C�����o�͊W�w�K���@�v
19. Registered on 2009.11.13. Applied on 2007.03.13. (Related
Paper is presented @ ICRA2007)
�@�FPatent Application No. 2007-063834,
Kawano H., �gMotion planning method for autonomous robot�h
�@�F����2007-063834�A��� �m�A�u�����ړ����{�b�g�̓���v����@�i�ȉ����j�v
18. Registered on 2009.09.18. Applied on
2004.03.01.
�@�FPatent Application No. 2004-056042�AKawano H., �hJoint actuator�h
�@�F����2004-056042�A��� �m�A�u�߃A�N�`���G�[�^�v
17. Registered on 2009.08.07. Applied on 2004.06.15.
�@�FPatent Application No. 2004-176320,
Kawano H., �gMulti-DOF ultrasonic motor and robot with torque control device�h
�@�F����2004-176320�A��� �m�A�u�g���N����@�\�t�����g���[�^�y�ђ����g���[�^���ڃ��{�b�g�v
16. Registered on 2009.06.26. Applied on
2004.02.06.
�@�FPatent Application No. 2004-030168�AKawano
H., Aoki S., Hirahara T., �gMonitoring device for ultrasonic motor�h
�@�F����2004-030168�A��� �m�A�ؖΖ��A�����B��A�u�����g���[�^��ԃ��j�^�����O���u�v
15. Registered on 2009.06.19. Applied on
2004.02.06. (Related Paper is published in IEEE-TRO)
�@�FPatent Application No. 2004-030166 ,
Kawano H., Hirahara T., �hMulti-DOF ultrasonic motor
and pre-loading device�h
�@�F����2004-030166�A��� �m�A�����B��A�u�����R�x�����g���[�^�y�ї\�����u�v
14. Registered on 2009.04.10. Applied on 2004.10.14.
�@�FPatent Application No. 2004-300792,
Kawano H., �gRobot control method and program�h
�@�F����2004-300792�A��� �m�A�u���{�b�g����@����уv���O�����v
13. Registered on 2009.02.06. Applied on 2004.06.04.
�@�FPatent Application No. 2004-166497,
Kawano H., �hFastening component and
pre-loading device�h
�@�F����2004-166497�A��� �m�A�u�����p���i�y�ї\���`�B���u�v
12. Registered on 2008.10.31. Applied on 2003.04.03.
�@�FPatent Application No. 2003-100027,
Kawano H., Hirahara T., �hMulti-DOF motor in
conductive liquid�h
�@�F����2003-100027�A��� �m�A�����B��A�u���d���t�̒������R�x���[�^�v
11. Registered on 2008.10.31. Applied on 2003.04.03. (Related Paper is published in IEEE
T-RO)
�@�FPatent Application No. 2003-100028, Kawano H., Hirahara T., �gPre-loading
device for multi-DOF ultrasonic motor�h
�@�F����2003-100028�A��� �m�A�����B��A�u�����R�x�����g���[�^�̗\�����u�v
10. Registered on 2008.10.31. Applied on 2003.05.28.
�@�FPatent Application No. 2003-151562,
Kawano H., Hirahara T., �gRotor and multi-DOF ultrasonic motor�h
�@�F����2003-151562�A��� �m�A�����B��A�u��]�q�y�ё����R�x�����g���[�^�v
09. Registered on 2008.10.31. Applied on 2003.05.28.
�@�FPatent Application No. 2003-151563�AKawano
H., Hirahara T., �gPre-loading device and multi-DOF ultrasonic motor�h
�@�F����2003-151563�A��� �m�A�����B��A�u�\�����u�y�ё����R�x�����g���[�^�v
08. Registered on 2008.10.31.
Applied on 2003.06.04. (Related Paper is published in IEEE-TRO)
�@�FPatent Application No. 2003-159714,
Kawano H., Hirahara T., �gMulti-DOF ultrasonic motor�fs rotating angle
control method and device�h
�@�F����2003-159714�A��� �m�A�����B��A�u�����R�x�����g���[�^�̉�]�ʒu������@�y�ё��u�v
07. Registered on 2008.10.31. Applied on 2003.09.09. (Related Paper is published in IEEE
T-RO)
�@�FPatent Application No. 2003-317095,
Kawano H., Hirahara T., �gMulti-DOF ultrasonic motor�fs rotating angle
control method and device�h
�@�F����2003-317095�A��� �m�A�����B��A�u�����R�x�����g���[�^�̉�]�ʒu������@�y�ё��u�v
06. Registered on 2008.08.01.
Applied on 2003.06.04. (Related Paper is published in IEEE-TRO)
�@�FPatent Application No. 2003-158974,
Kawano H., Hirahara T., �hMulti-DOF ultrasonic motor�fs rotating angle control
device�h
�@�F����2003-158974�A��� �m�A�����B��A�u�����R�x�����g���[�^�̉�]�q�p���p���䑕�u�v
05. Registered on 2008.08.01. Applied on 2003.05.28.
�@�FPatent Application No. 2003-151565,
Kawano H., Hirahara T., �hThree-DOF load weight driving mechanism and method�h
�@�F����2003-151565�A��� �m�A�����B��A�u���d�ʕ����S�O���R�x�쓮���u�v
04. Registered on 2008.08.01. Applied on 2003.05.28.
�@�FPatent Application No. 2003-151564,
Kawano H., Hirahara T., �hThree-DOF load weight driving mechanism and method�h
�@�F����2003-151564�A��� �m�A�����B��A�u���d�ʕ����S�O���R�x�쓮���u�v
03. Registered on 2008.08.01.
Applied on 2003.04.03. (Related Paper is published in IEEE
T-RO)
�@�FPatent Application No. 2003-100029,
Kawano H., Hirahara T., �hMethod and apparatus for measuring rotation angles of
spherical rotor of multi-DOF ultrasonic motor�h
�@�F����2003-100029�A��� �m�A�����B��A�u�����R�x�����g���[�^�̉�]�q�p���p�v�����@�y�ё��u�v
02. Registered on 2008.03.28. Applied on 2004.08.11.
�@�FPatent Application No. 2004-234761,
Kawano H., �hArticulated robot�h
�@�F����2004-234761�A��� �m�A�u�߃��{�b�g�v
01. Registered on 2007.09.28. Applied on
2004.05.18.
�@�FPatent Application No. 2004-147115,
Kawano H., �hMatch-type fighting game machine�h
�@�F����2004-147115�A��� �m�A�u�ΐ�^�i���Q�[���@�v
��Publications in
Japanese
(�u���@�m�v is
Japanese description of my name)
��Awards
��*2���{���b�N2006�_�����uJournal
of Robotics and Mechatronics Robomec 2006 ���W���v���E�F���{�@�B�w���A���{�e�B�N�X���J�g���j�N�X���� 2006�N
���@�m�u���m�O�������q�s���鎩����s�D�̎O������Q������v
�����{���b�N�\���F���{�@�B�w���A���{�e�B�N�X���J�g���j�N�X���� 2004�N
���@�m�A�����@�p�R���u���d�A�N�`���G�[�^�ɂ�鍏��Ȃ��˂��̊J���v
��*3���{���b�N2004�_�����uJournal
of Robotics and Mechatronics Robomec 2004 ���W���v���E�F���{�@�B�w���A���{�e�B�N�X���J�g���j�N�X���� 2004�N
���@�m�A�����@�p�R���u���d�A�N�`���G�[�^�ɂ�鍏��Ȃ��˂��̊J���v
���l�H�m�\�w��S�����D�G�_���܁F�l�H�m�\�w��2003�N
��� �m , �Y �@�u�q�s���v���Ԃ��l��������z���m�~�b�N�����^�C�����{�b�g�̓���v��A���S���Y���̋����Ƌ����w�K�ɂ��l��
�v
�����{���{�b�g�w�������܁F���{���{�b�g�w��2002�N
���@�m�u���������ł̍q�s��z�肵�������^�C�����{�b�g�̌P���V�X�e���v
���l�H�m�\�w��S�����D�G�_���܁F�l�H�m�\�w��2002�N
��� �m , �Y ��
�u�����Ƌ����w�K�ɂ�鎩���^�C�����{�b�g�̒������ɂ�����^������A���S���Y���̊l���v
��Japanese
Journal Papers
�����@�m�A�����@�p�R���A�����@�B���A���@���M�A��H�@��s�u���אڑ���Ԃ̑����R�x�����g���[�^�̎O���R�x��]�쓮�����@�|���Տꊴ�`�B���{�b�g�u�e���w�b�h�v�ւ̓K�p�|�v�M�w��_����A,
Vol.J87-A, No.11, pp.1386-1394, 2004.
�����@�m�A�����@�p�R���A�����@�B��A�u�\���������ɂ����鑽���R�x�����g���[�^�̉�]�ʒu�����@�v�����g�e�N�mVol.17, No.4,
2005.
����� �m , �Y ��
�u�����^�C�����{�b�g�̌P���V�X�e�� : ����1 ��Q������s���̋����Ǝ��Ȋw�K
�v���Y���� 52(8), 360-363, 2000-08.
����� �m , �ߓ� ��l , �Y ��
�u�����C�����{�b�g�̉��u����Ɋւ��錤�� : ����1 : ���Ԓx��ɑΉ�����V�X�e���\�z�v���{���D�w��_���W (182), 499-506,
1997-12.
���Y �� , ���� �h�j , �i�� ���i , ���� ���u , ���� �͎� , ��� �C�i , �⊪ �� , ���� �^�� , ��� �m , ���� �r�h , ���� �ʖ� , �y�� ���j�@�u�q�s�^�C�����{�b�g �u�A�[�������E���{�b�g�v �ɂ���ΊC�u�ϑ�
�v
�C�m�����Z�p 13(1), 11-25,
2001-03-31�D
��Japanese
Proceedings papers
��*2���@�m�u���m���O�������q�s���鎩����s�D�̎O������Q������v�A2006���{�@�B�w��{�e�B�N�X���J�g���j�N�X�u����(Robomec2006)�A May,
2006.
�����@�m�u�V���[�e�B���O�Q�[���̓G�@���삨��эU���e���˃A���S���Y���Ɋւ���l�@�v�A����w���16��Q�[�����w������AJune,
2006.
��*3��� �m�A���� �p�R���A�u���d�A�N�`���G�[�^�ɂ�鍏��Ȃ��˂��̊J���v�A2004���{�@�B�w��{�e�B�N�X���J�g���j�N�X�u����(Robomec2004)�A June,
2004.
�����@�m�u�����𑜓x�A����ԋ�Ԃɂ�鍂���t�B�[�h�t�H�[���[�h����v�A��18��l�H�m�\�w��S�����(JSAI2004)�A June, 2004.
����� �m�A���� �p�R���A���� �B�� �u���אڑ���Ԃɂ����鑽���R�x�����g���[�^�̑����R�x��]�ʒu�����@�@�|���Տꊴ�`�B���{�b�g�h�e���w�b�h�h�ւ̓K�p�|�v�A���Ǖt���_���A��9�{�e�B�N�X�V���|�W�A�A�gMulti-DOF
Control Method for Multi-DOF Ultrasonic Motor equipped with Weight Load
–Application to Auditory Tele-existence Robot �gTeleHead�h-�h, The 9th
Robotics Symposia, pp.541-548, March, 2004, Naha, Japan.
����� �m�A���� �B��@�u�����R�x�����g���[�^�̍��Տꊴ�`�B���{�b�g-�e���w�b�h-�ւ̓K�p��@ -�\���@�\�ƎO���R�x��]�ʒu�v����@-�v�A��21����{���{�b�g�w��w�p�u����(RSJ2003)�ASeptember, 2003.
����� �m�A���� �B��@�u�����R�x�����g���[�^�̉�]�ʒu���� -�\���������ɂ�����K�������@-�v��21����{���{�b�g�w��w�p�u����(RSJ2003)�ASeptember, 2003.
����� �m, ���� �B��@�u�\���������ɂ����鑽���R�x�����g���[�^�̉�]�ʒu�����@�v2003�N���{�����w��H�G�������\��(ASJ2003)�ASeptember, 2003.
����� �m, �Y �@�u�q�s���v���Ԃ��l��������z���m�~�b�N�����^�C�����{�b�g�̓���v��A���S���Y���̋����Ƌ����w�K�ɂ��l��
�v��16��l�H�m�\�w��S�����(JSAI2002), April, 2002.
���Y�@�C��� �m�C ���c �m�i, �⊪ �� �u�����C�����{�b�g�p���z�C�����V�~�����[�^MVS-3�̊J���v ��19����{���{�b�g�w��w�p�u����(RSJ2001), September, 2001.
����� �m, �Y �u1P1-L5 �����Ƌ����w�K�ɂ�鎩���^�C�����{�b�g�̒������ɂ�����^������A���S���Y���̊l��(4. �������{�b�g�E���J�g���j�N�XII)
�v
2001���{�@�B�w��{�e�B�N�X���J�g���j�N�X�u����(Robomec2001), 30, June, 2001.
����� �m, �Y �u�����Ƌ����w�K�ɂ�鎩���^�C�����{�b�g�̒������ɂ�����^������A���S���Y���̊l���v��15��l�H�m�\�w��S�����_���W(JSAI2001), April, 2001.
����� �m, �Y ��
�u���������ł̍q�s��z�肵�������^�C�����{�b�g�̌P���V�X�e���v�A���Ǖt���_���A��6�{�e�B�N�X�V���|�W�A�A
�gTraining System for Autonomous Underwater Vehicle Considering Mission under
Severe Disturbance�h, The 6th Robotics Symposia, pp.198-204, March,
2001, Syuzen-ji, Japan.
����� �m, �ߓ� ��l, �Y �u�����C�����{�b�g�̉��u����Ɋւ��錤��(����1) : ���Ԓx��ɑΉ�����V�X�e���\�z : ����9�N�H�G�u���_���T�v�vTechno
marine : bulletin of the Society of Naval Architects of Japan : ���{���D�w� (820),
734, October, 1997.
![]()
Resume
1991.03.31: I graduated Saitama Prefectural Urawa High
School, Saitama, Japan.
1995.03.31: I received bachelor degree of Engineering from
the department of Naval Architechture and Oceanic Engineering in the University
of Tokyo, Japan.
1997.03.31: I received master degree of Engineering from the
department of Naval Architechture and Oceanic Engineering in the University of
Tokyo, Japan.
1997.04.01: I joined Mitsubishi Electric Corporation. Until
1999.5.31, I worked for the development of industrial robots @ Nagoya, Japan.
2002.09.30: I received doctoral degree of Engineering from
the department of Naval Architechture and Oceanic Engineering in the University
of Tokyo, Japan.
2002.10.01: I joined NTT Communication Science Laboratories
in NTT Corporation. Until now, I am working on basic robotics research @
Atsugi, Japan.
Memberships
IEEE Member, Japanese Society of Mechanical Engineering,
Japanese Society of Artifitial Intelligence
(Last Update 2022.04.07)