
| 12 |
How should we interact softly from afar?Realizing a highly compliant remote-operated robot 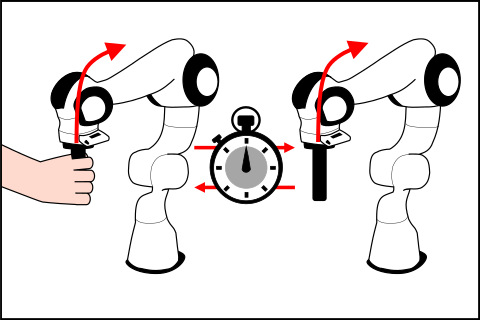
|
|---|
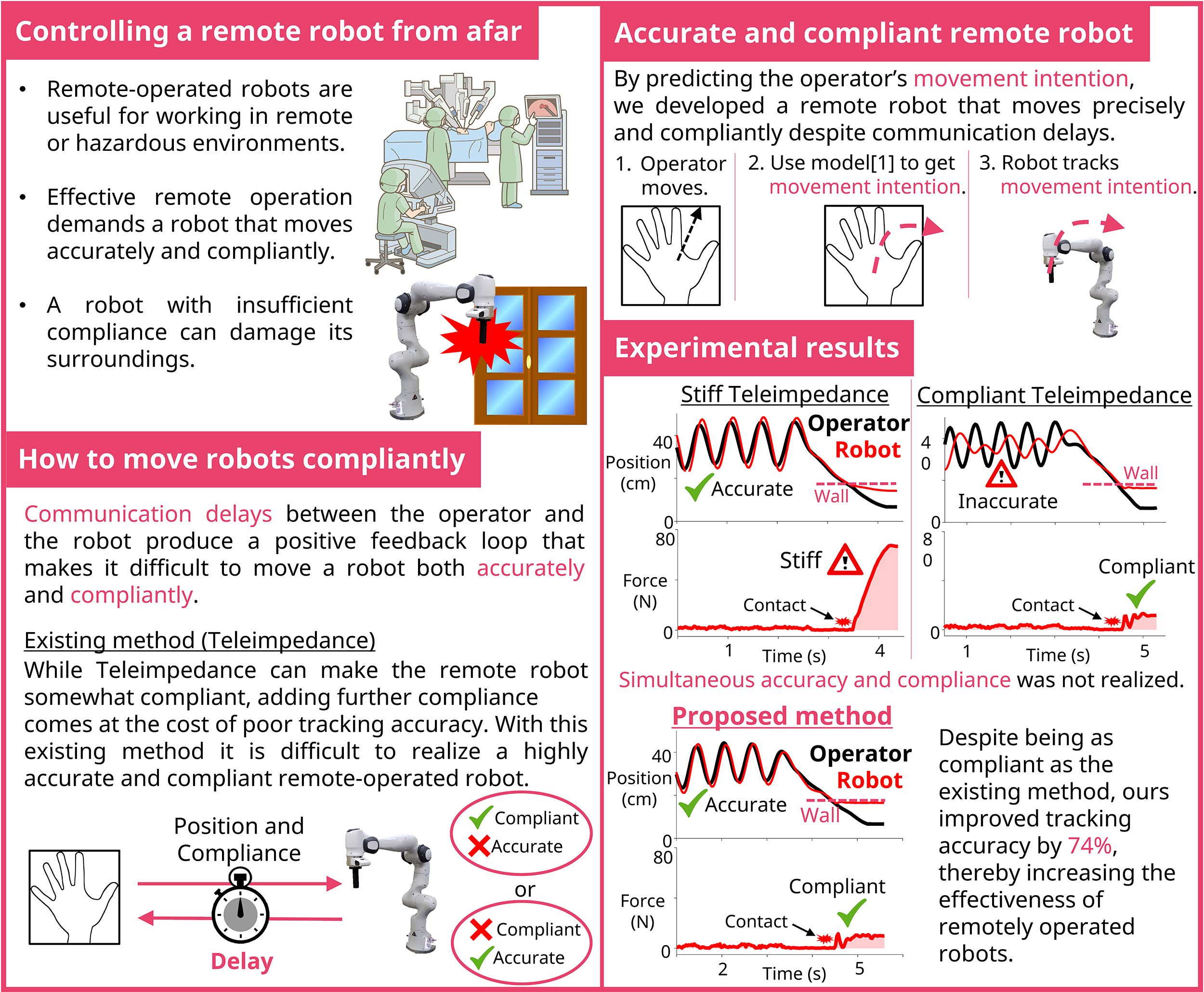
Teleoperation, the technology of controlling robots from a distance, is useful for remote medicine and for working in inaccessible or hazardous environments. These remote-operated robots need to move accurately and interact safely or compliantly with their surroundings. Conventional remote-operated robots have trouble accurately following or tracking the movements of a human operator whilst moving compliantly, especially in the presence of communication delays. By predicting the operator’s movement intention based on a model of their movement characteristics, we developed a method to control a remote-operated robot accurately and compliantly in the presence of communication delays. Our technology enables intuitive control of remote robots that safely interact with their environment. We hope it will contribute towards the creation of safe space sharing between humans and robots, and to the development of robots that physically care for and interact with people.
[1] A. Takagi, Y. Li, E. Burdet, “Flexible assimilation of human's target for versatile human-robot physical interaction,” IEEE Transactions on Haptics, Vol. 14, No. 2, pp. 421-431, 2020.

Atsushi Takagi
Sensory and Motor Research Group, Human Information Science Laboratory