Abstract
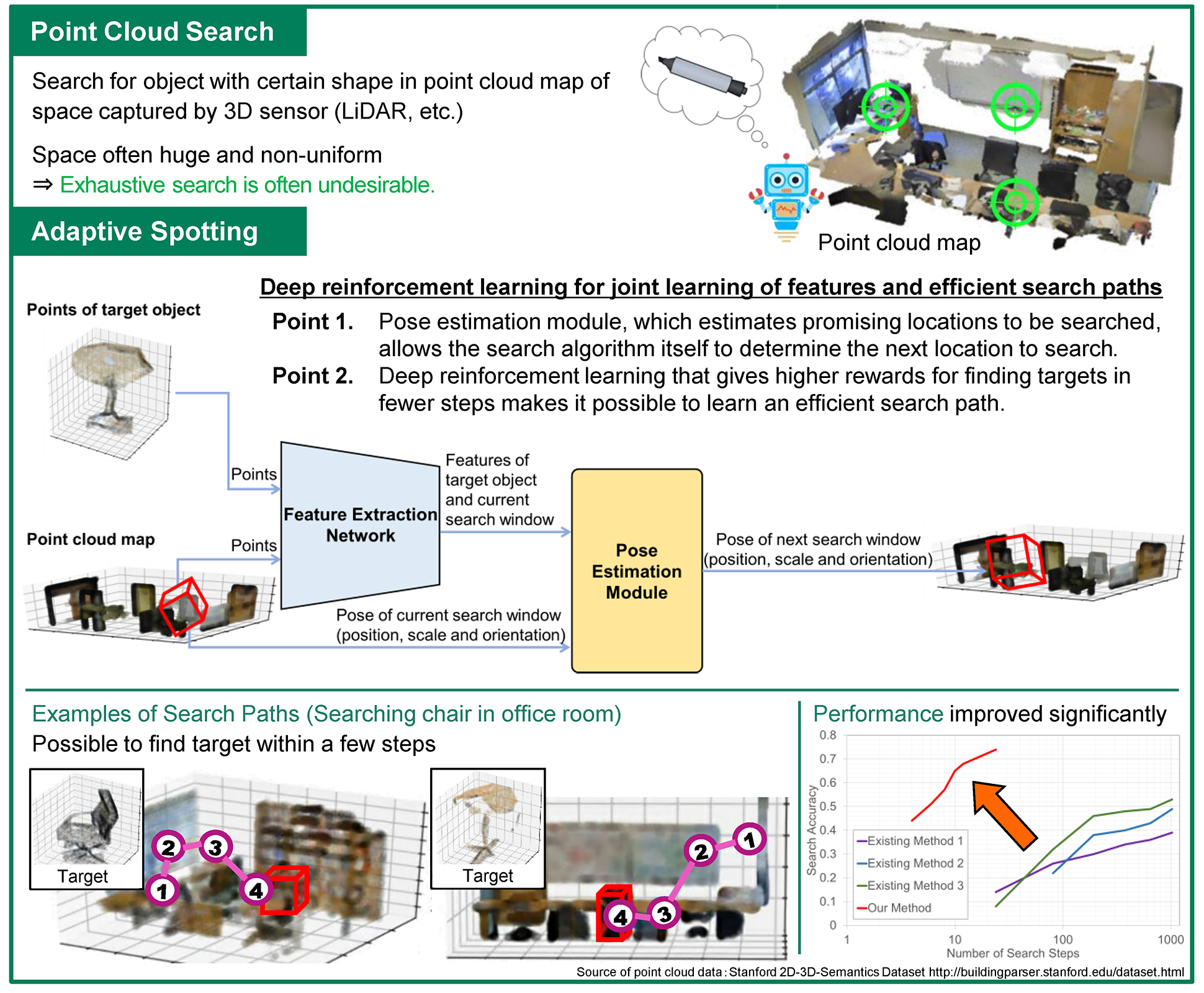
We propose Adaptive Spotting, a deep reinforcement learning approach to object search from a scene represented by a 3D point cloud map. A straightforward approach using exhaustive search is often not promising due to poor computational efficiency. To solve this problem, our approach simultaneously learns the features of a given object and its efficient search path. Our network is designed to have a pose estimation module to estimate promising locations to be explored. The network is trained in an end-to-end manner to learn efficient search paths by using a reinforcement learning strategy that gives a higher reward when it finds the target in fewer search steps. Evaluation results demonstrate that our approach outperforms several state-of-the-art methods in both search accuracy and the number of search steps required. It is expected to be used in areas such as logistics, manufacturing, and transportation, which require the ability to search for objects in 3D space fast and accurately.
Onkar Krishna / Recognition Research Group, Media Information Laboratory
Email: