


研究展示
| 12 |
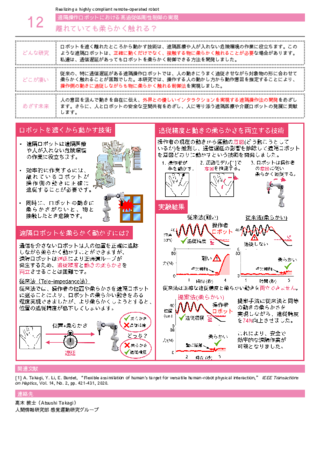
離れていても柔らかく触れる?遠隔操作ロボットにおける高追従低剛性制御の実現 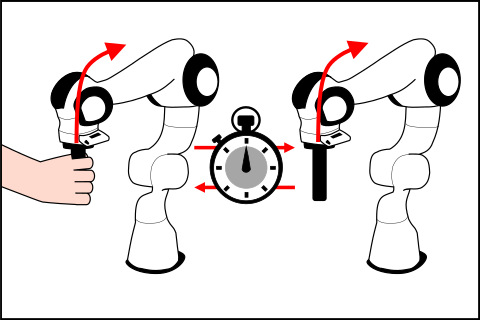
|
|---|
| どんな研究 |
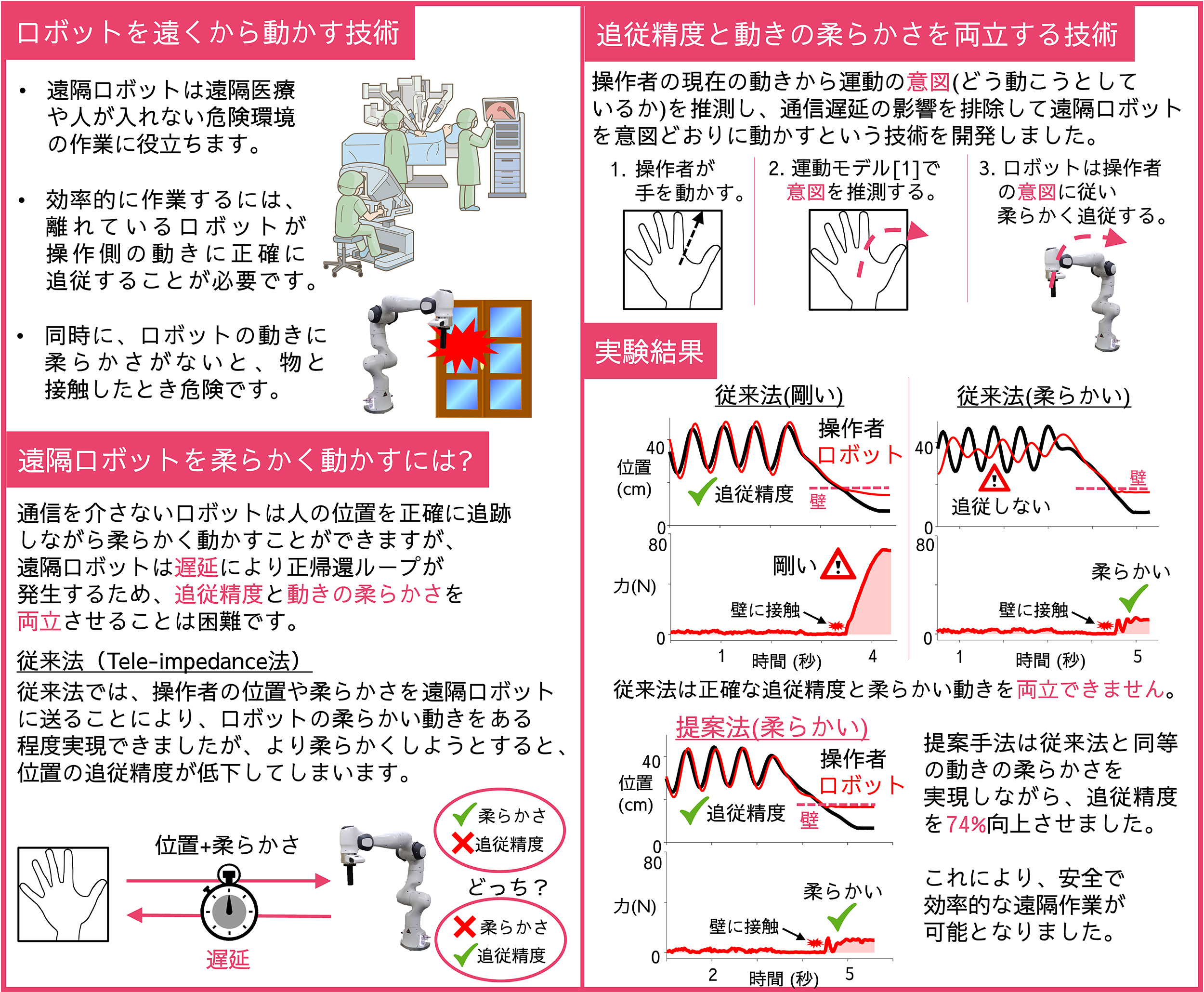
ロボットを遠く離れたところから動かす技術は、遠隔医療や人が入れない危険環境の作業に役立ちます。このような遠隔ロボットは、正確に動くだけでなく、接触する物に柔らかく触れることが必要な場合があります。私達は、通信遅延があってもロボットを柔らかく制御できる方法を開発しました。 |
|---|---|
| どこが凄い |
従来の、特に通信遅延がある遠隔操作ロボットでは、人の動きにうまく追従させながら対象物の形に合わせて柔らかく触れることが困難でした。本研究では、操作する人の動かし方から動作意図を推定することにより、操作側の動きに追従しながらも物に柔らかく触れる制御法を実現しました。 |
| めざす未来 |
人の意図を汲んで動きを自在に伝え、外界との優しいインタラクションを実現する遠隔操作法の開発をめざします。さらに、人とロボットの安全な空間共有をめざし、人に寄り添う遠隔医療や介護ロボットの発展に貢献します。 |
[1] A. Takagi, Y. Li, E. Burdet, “Flexible assimilation of human's target for versatile human-robot physical interaction,” IEEE Transactions on Haptics, Vol. 14, No. 2, pp. 421-431, 2020.
動画の公開は終了いたしました。
高木 敦士(Atsushi Takagi)
人間情報研究部 感覚運動研究グループ