
| 12 |
Material perception through visionVision-based methods for conveying softness and stickiness 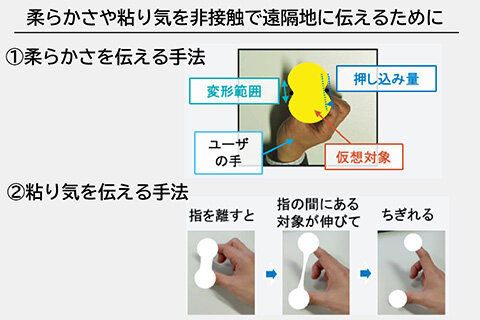
|
|---|
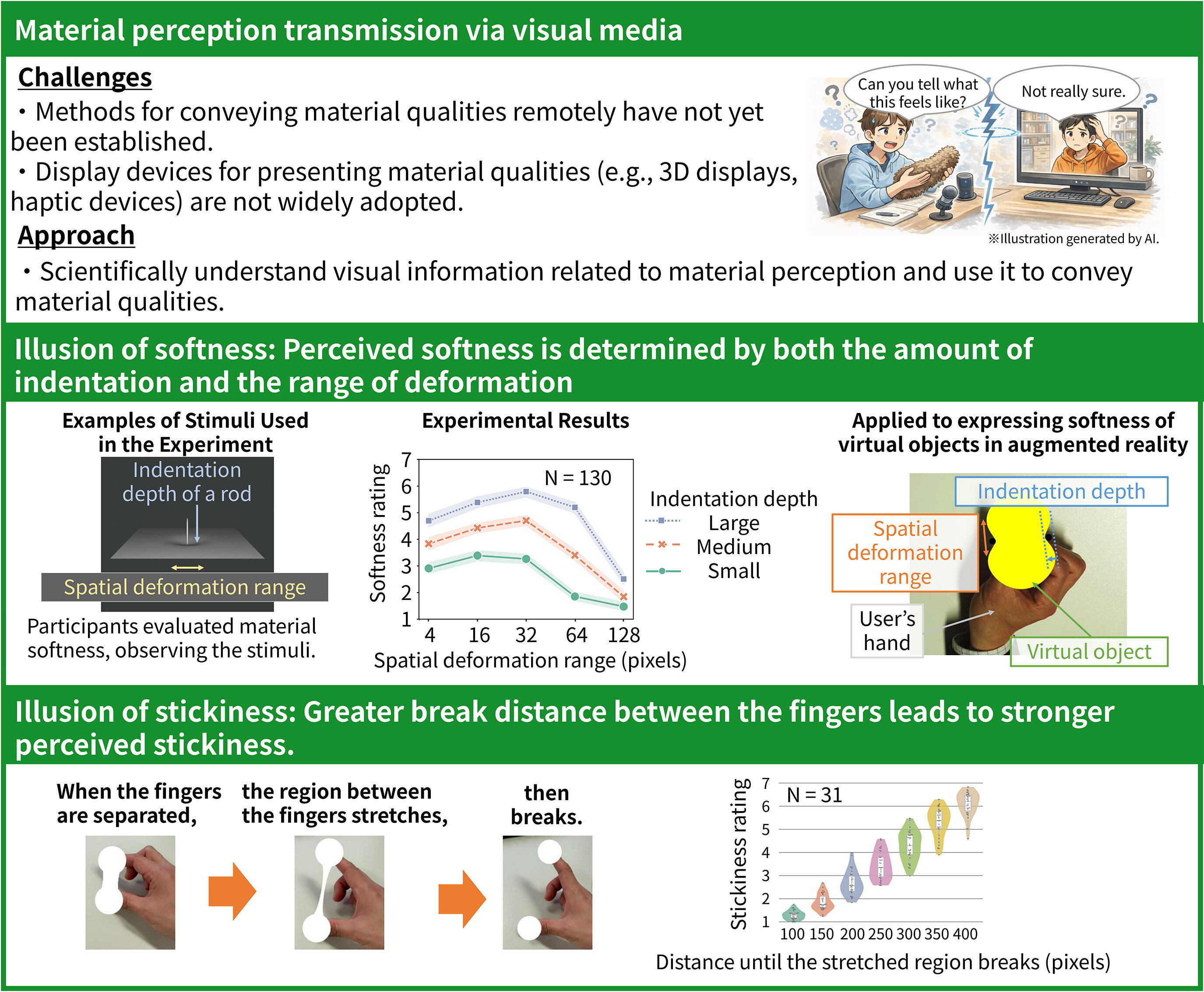
Augmented reality (AR) can easily reproduce the motion and deformation of objects; however, assigning convincing material qualities to those objects is often difficult through simple physical simulation alone. In this study, we present an approach for conveying material perception in AR by leveraging visual illusions based on apparent surface properties. We developed methods to represent softness and viscosity through visual cues. For the illusion of softness, the perceived compliance is controlled by adjusting the amount of indentation and the range of deformation in AR space. For the illusion of sliminess, viscosity is expressed by modulating the deformation of the region presented between the user’s fingers. Our interface enables rich material perception using vision alone, without the need for haptic devices, significantly enhancing both the realism and expressive flexibility of AR experiences. This approach has the potential to enrich everyday scenarios, such as supporting perceptual evaluation during online product selection.
[1] T. Kawabe, Y. Ujitoko, “Visual features involved in determining apparent elasticity elicit touch desire,” IEEE Transactions on Visualization and Computer Graphics, Vol. 31(10), pp. 9530 – 9536, 2025.
[2] T. Kawabe, T. Morisaki, Y. Ujitoko, “Unbreakable bond: induced viscosity between the fingers,” The 47th European Conference on Visual Perception, 2025.

Takahiro Kawabe, Sensory Interface Research Group, Human Information Science Laboratory