


| 01 |
信号機を使わないリアルタイム分散交通制御デジタルツインを介した集合知学習技術 
|
|---|
| どんな研究 |
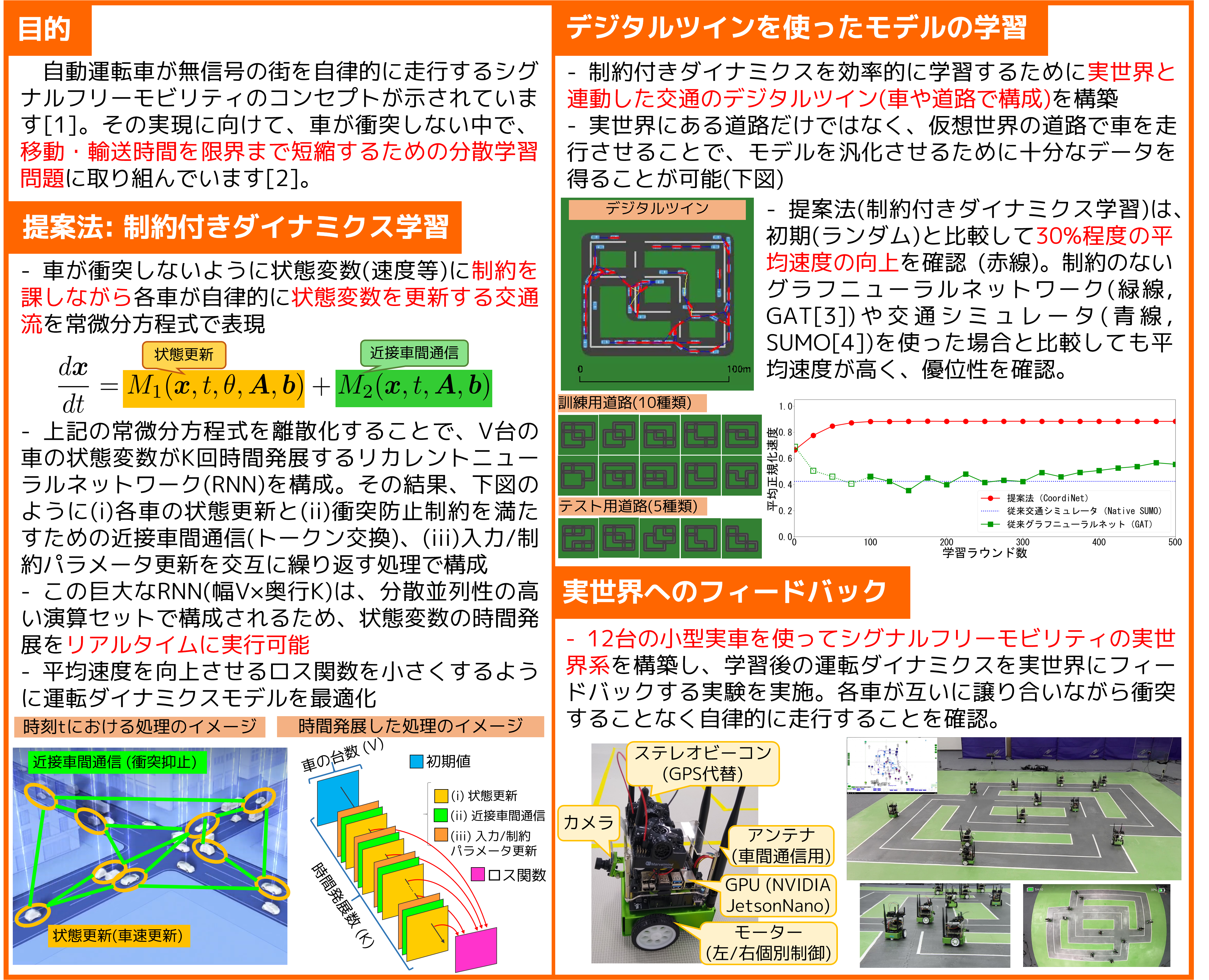
信号機のない街を自動運転車が走行する時代を見据え、通信を介して各車が自律的に速度等の状態を制御すること(シグナルフリーモビリティ)がIOWNで提唱されています。その実現のための(a)基盤数理、(b)デジタルツイン(実世界と連動したシミュレーション系)を用いた制御モデルの学習、(c)実世界交通制御へのフィードバックについて紹介します。 |
|---|---|
| どこが凄い |
車が衝突しない制約下で平均速度を最大化する学習法を考案しました。分散並列計算によりリアルタイム処理を実現できる交通流を常微分方程式によって表現しました。その離散化により、(i)近接車間の通信(衝突防止のためのトークン交換)と(ii)各車内の状態更新を交互に繰り返すニューラルネットワークを構築しました。 |
| めざす未来 |
デジタルツインを介して、IoT機器群が分散協調することにより、単一のIoT機器では成し得なかった高度な全体効率性や集合知モデルを手に入れることができるでしょう。リアルタイム性の高い分散計算を通じて巨大な系(例えば、交通網、エネルギー網、物流網)を最適制御することにより、社会に貢献することをめざします。 |
[1] IOWNコンセプトビデオ, “Mobility by IOWN,” YouTube, 2019
[2] K. Niwa, N. Ueda, H. Sawada, A. Fujino, S. Takeda, B. Kleijn, G. Zhang, “CoordiNet: Constrained dynamics learning for state coordination over graph,” in Proc. the 26th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining (KDD 2022), 2022 (under review).
[3] P. Veli?kovi?, G. Cucurull, A. Casanova, A. Romero, P. Lio, Y. Bengio, “Graph attention networks,” arXiv preprint arXiv:1710.10903, 2017.
[4] Simulation of Urban MObility (SUMO), https://www.eclipse.org/sumo/

丹羽 健太 (Kenta Niwa)協創情報研究部 知能創発環境研究グループ
Email: cs-openhouse-ml@hco.ntt.co.jp